














基本信息
- 项目名称:
- 基于嵌入式技术的深井打捞机
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 为了实现对被打捞对象迅速打捞救援,同时还要保证被打捞对象和救援人员的生命安全的问题,为此设计了“基于嵌入式控制技术的深井打捞机”,通过它来解决井下作业困难的问题。本机结构合理,能方便准确地对物体进行抓取打捞救援,同时配有单片机和气缸等控制系统,操作更加便捷,准确。本机可调大小,适用于不同大小井口的打捞。结构小巧,可拆卸式结构方便携带,性价比合理,适合广泛推广应用。
- 详细介绍:
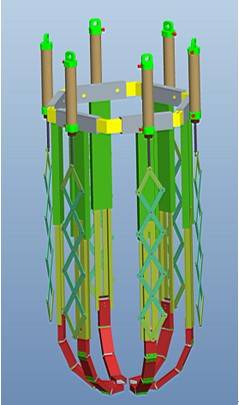
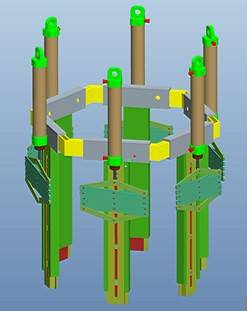
- “基于嵌入式控制技术的深井打捞机”该作品的设计是机械结构上采用可调式的六角架及其U型滑道和放大装置及机械手等结构。控制上采用ARM平台操作,利用可视化的界面完成更加准确的操作。 同时打捞机上可配有摄像头、对讲机等,可以观察到井底被救人或物品所处的状况,便于制定出更好的营救方案。 本打捞机的手臂与手臂的相对位置可以调节,以适合救援时被救人或打捞的物品不同体位导致的复杂情况,同时每个手臂可以单独控制。 亮点是:放大装置是通过连杆机构组成的放大装置,由轴承连接而成,可以灵活的放大三倍的长度距离,收缩后又不占多余的空间。弥补现有装置的长度不足问题。机械手的设计:利用简单的小块组合,实现了手的收缩和伸开动作。在机械手的连接处引用关节轴承可以进行改进处理,更加接近真的仿真手。 大致的工作原理:将机器用钢丝绳吊挂在将要打捞的深井里,通过ARM平台的可视化窗口,在机器上安装的摄像头可以采集井下的工作环境,确定好位置后,操作相应的按钮,发出信号给单片机,单片机按照预先编好的程序给电磁阀发出指令,控制气缸的充气,同时气缸伸缩,带动放大装置伸开,联动滑道下滑和里面的机械手弯曲并有钢丝绳拉紧和卡紧装置进行自锁。手臂的下滑有反馈装置进行反馈信号。同时也配有温湿度传感器同步实时监测井下的情况。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 我国是世界上开发利用地下水最早的国家之一,同时,我国也拥有大量水井及类似的深井,但经常有因管理不善而造成人员(特别是老人和儿童)或物品坠井的事故。目前,打捞工具几乎空白,只能用传统的方式救援,如从侧壁挖开或将救援人员直接送到井下去施救,这不仅威胁救援人员的生命安全,更耽误了宝贵的救援时间。为了实现对坠井被救对象迅速救援同时还要保证被救对象和救援人员的生命安全的问题,我们设计了基于嵌入式技术的深井打捞机,通过它来解决井下救援困难的问题。本机结构合理,能方便准确地对人体进行抓取救援,同时配有ARM平台及单片机和气缸等控制系统,操作更加便捷,准确,操作更加自动化。本机不仅可以井下打捞救援,还可以打捞坠落在深井的物品。本机可调大小,适用于不同大小井口的救援。结构小巧,可拆卸式结构方便携带,性价比合理,适合广泛推广应用。同时也为我国井下救援工作提供了新的救援器械。
科学性、先进性
- 机械手的设计:利用简单的小块组合,实现了手的收缩和伸开动作。在机械手的连接处引用关节轴承可以进行改进处理,更加接近真的仿真手。 放大装置:通过连杆机构组成的放大装置,由轴承连接而成,可以灵活的放大三倍的长度距离,收缩后又不占多余的空间。弥补现有装置的长度不足问题。 滑道:U型滑道正反安装,节省了空间,增加了导程。 六角架:可伸缩式安装方便,适应范围更广。 本打捞机的手臂与手臂的相对位置可以调节,以适合救援时被救人或打捞的物品不同体位导致的复杂情况,同时每个手臂可以单独控制。 打捞机上可配有摄像头、对讲机等,可以观察到井底被救人或物品所处的状况,便于制定出更好的营救方案。 采用ARM平台操作,利用可视化的界面完成更加准确的操作。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、产品和现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 我国是农业大国,随着农业的发展,田地灌溉也成为必不可少的工作,所以田间广泛分布着各式各样的水井。人员(特别是老人和儿童)或物品坠井事件娄见不鲜,而救援工具几乎空白。目前只能用传统的方式救援,如从侧壁挖开或将消防员直接送到井下去施救,这不仅威胁消防员的生命,更耽误了宝贵的救援时间。本机以小巧方便,适应范围广而专长,填补了这方面的空白,另外本机也能用于城市排水井和立式矿井的救援工作。故使用范围更广,推广价值更强。同时利用ARM嵌入式操作,使控制系统更加自动化,同时达到机电结合的目的,为更加迅速救援提供了更加有效的辅助保障。
同类课题研究水平概述
- 深井打捞机目前在国内外主要是打捞设备的发展热门,但是对于基于嵌入式技术控制的打捞机还未曾有过。 目前,通过调研发现国内外的研究如下:“井下探险救援机器人语音通信系统实现”,该课题介绍了一种基于vc++开发的井下探险救援机器人语音通信系统。该系统采用模块化设计,能够实现上位监控机和井下机器人控制机之间的语音通信。实践证明,该语音通信系统提高了井下探险救援机器人的智能性、可靠性、安全性和适应能力,扩大了井下机器人的应用范围。 “灾难救援机器人研究现状、关键性能及展望”该论文对日本、美国和中国等国家灾难救援机器人的研究现状和研究计划进行综述。根据世界各国救援机器人技术的研究现状,结合救援机器人在实际应用中取得的经验和教训,归纳和总结出救援机器人的关键性能为:存活能力、运动能力、感知能力、通信能力和作业能力。研究结果表明,灾难救援机器人研究逐步从试验研究转入到实际应用,多种技术融合化、多智能体网络化是今后灾难救援机器人研究的发展方向。防灾、减灾和救灾事关人民生命和财产安全,是国家公共安全的重要组成部分。救援机器人技术是国家发展迫切需要的战略必争的核心技术之一,将在国民经济和安全中起着重要作用并具有重大的战略意义。 因此,目前这种深井打捞救援设备对救援工具来说是很热门的课题。大部分是采用机械式的救援方式,但是对于利用嵌入式技术控制的救援设备还未曾出现过。这对深井救援工具的发展是很好的推动作用。








