














基本信息
- 项目名称:
- 腿型连续跳跃机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 腿型连续跳跃机器人属于一种关节式跳跃机器人,由两个主动关节和一个被动关节及具有柔顺的脚掌组成,机器人在电机及蓄能元件的耦合驱动下实现跳跃运动,柔顺脚掌和被动关节的引入提高了机器人的跳跃性能和落地稳定性。本作品主要从机器人结构设计及机构参数优化、运动轨迹规划、动力特性分析及落地稳定性等方面进行了研究。本作品在考古探测、军事侦察、地质勘探、抢险救灾等活动中有广阔的应用前景。
- 详细介绍:
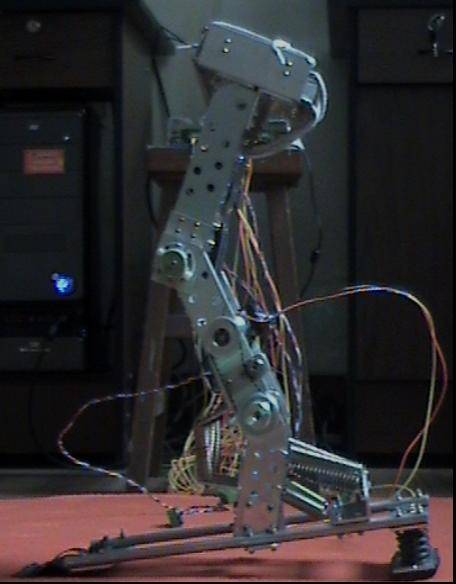
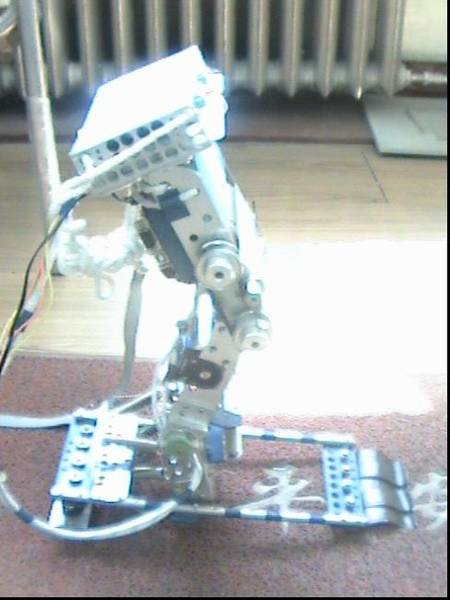
- 腿型连续跳跃机器人属于一种关节式跳跃机器人,能够实现连续稳定的跳跃运动。 本作品在结构上可以抽象成由三个铰接关节组成的串联四杆机构,其中有两个主动关节和一个被动关节。两个主动关节由直流伺服电机和弹性元件耦合驱动为跳跃运动提供动力,这两个关节的相互配合运动是机器人跳跃的关键,通过对这两个关节运动空间的规划实现机器人质心运动的轨迹规划,从而使机器人获得良好的跳跃性能。被动关节由弹性元件和阻尼进行约束,主要作用是延长起跳时间从而提高跳跃性能,同时在机器人落地时起到减震和缓冲的作用,保证机器人能够平稳落地,为连续跳跃运动打下基础。 本作品的设计思路为以机器人的起跳机理和落地稳定性为主要研究目标,首先建立机器人跳跃运动的运动学模型和动力学模型,并对跳跃运动过程进行轨迹规划和动力特性研究,在完成机构参数优化后,完成机器人结构的本体设计、加工和装配工作,最终形成控制算法在搭建好的控制系统平台上运行从而实现机器人稳定的连续跳跃运动。 创新点及技术关键: 1)机器人采用关节运动的蓄能方式,提高了蓄能效率; 2)关节采用直流伺服电机和弹性元件耦合驱动的方式,其中电机实现关节控制来调整姿态,弹性元件用于蓄能并弥补电机启动瞬时加速度的不足; 3)采用柔顺脚掌及被动关节设计,调高了跳跃性能并改善了落地稳定性,打下了连续跳跃运动的基础,为脚掌欠驱动问题的解决提供了思路。 4)技术关键为:结构设计及机构参数优化,起跳机理研究,质心及关节空间的轨迹规划,落地稳定性研究。 主要技术指标:机器人能够实现稳定的连续跳跃运动,跳跃高度和远度可以根据规划而改变,可实现的跳跃最大高度为200mm,最大远度为300mm。 通过模仿生物的跳跃运动来提高机器人的地形适应能力、拓展机器人的活动范围并降低能耗,可以实现机器人在有障碍物或沟渠、甚至是有危险情况发生的复杂地势中运动,在考古探测、军事侦察、地质勘探、抢险救灾等活动中有广阔的应用前景,同时因其具备强的低重力空间活动能力而在星际探索中更具运动优势,此外,研究跳跃机器人有助于对生物奔跑、跳跃运动机理的深入了解,对改善目前步行或爬行等迟缓运动方式有很好的启发意义。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的:通过模仿生物的跳跃运动来提高机器人的地形适应能力、拓展机器人的活动范围并降低能耗,可以实现机器人在有障碍物或沟渠、甚至是有危险情况发生的复杂地势中运动,在考古探测、军事侦察、地质勘探、抢险救灾等活动中有广阔的应用前景,同时因其具备强的低重力空间活动能力而在星际探索中更具运动优势,此外,研究跳跃机器人有助于对生物奔跑、跳跃运动机理的深入了解,对改善目前步行或爬行等迟缓运动方式有很好的启发意义。 基本思路:模仿人腿的跳跃运动进行设计,从机器人的起跳机理和落地稳定性的研究入手,首先完成机器人的结构设计以及机构参数优化,接着建立机器人跳跃运动的运动学模型和动力学模型,并对跳跃运动过程进行轨迹规划和动力特性研究,最终形成控制算法在搭建好的控制系统平台上运行从而实现机器人的跳跃运动。 创新点:1)机器人采用关节运动的蓄能方式,提高了蓄能效率; 2)关节采用直流伺服电机和弹性元件耦合驱动的方式,其中电机实现 关节控制来调整姿态,弹性元件用于蓄能并弥补电机启动瞬时加速度的不足; 3)采用柔顺脚掌及被动关节设计,调高了跳跃性能并改善了落地稳定 性,打下了连续跳跃运动的基础,为脚掌欠驱动问题的解决提供了思路。 技术关键:起跳机理研究,质心及关节空间的轨迹规划,落地稳定性研究。 技术指标:机器人能够实现稳定的连续跳跃运动,跳跃高度和远度可以根据规划而改变,可实现的跳跃最大高度为200mm,最大远度为300mm。
科学性、先进性
- 北京某大学研制的双臂弹性单腿跳跃机器人借助两个驱动臂的摆动,驱动弹性被动伸缩腿实现跳跃。由于该跳跃机器人结构对称,运动过程时刻处于动平衡状态,仅限于对弹性欠驱动机械系统振动能量的循环利用技术的研究; 西安某大学利用躯干、大腿、小腿及脚掌的铰接组成五杆闭环机构,研制了仿袋鼠跳跃机器人,该仿袋鼠跳跃机器人忽略了袋鼠脚掌的柔性,在柔性脚掌对减缓冲击、降低冲击加速度、积蓄能量并产生瞬间爆发力等关键问题的研究上参考价值不大; 哈尔滨某大学研制的仿蛙跳跃机器人,通过传动箱的动力传动拉伸弹簧蓄能,放松后实现跳跃运动,该仿蛙跳跃机器人的前腿采用弹簧片代替,仅限于对弹跳能力的研究,而对弹跳机器人的软着陆及跳跃稳定性等方面的研究具有一定的局限性。 较之上述的跳跃机器人,本作品在关节式结构的基础上,从关节式跳跃机器人轨迹规划、动力特性、跳跃稳定性及控制策略等方面进行了研究和尝试,并通过引入被动关节和柔顺脚掌改善了机器人的跳跃性能并提高了机器人的落地稳定性。
获奖情况及鉴定结果
- 无
作品所处阶段
- 中试阶段
技术转让方式
- 非专利技术转让
作品可展示的形式
- 实物、产品;现场演示;录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 腿型连续跳跃机器人是由电机和蓄能元件耦合驱动的关节型跳跃机器人,该跳跃机器人由两个主动关节和一个被动关节及具有柔顺的脚掌组成,机器人在电机及蓄能元件的耦合驱动下实现稳定的连续跳跃运动,柔顺脚掌和被动关节的引入提高了机器人的跳跃性能和落地稳定性。本作品主要从机器人结构设计及机构参数优化、运动轨迹规划、动力特性分析及落地稳定性等方面进行了研究。 通过模仿生物的跳跃运动来提高机器人的地形适应能力、拓展机器人的活动范围并降低能耗,可以实现机器人在有障碍物或沟渠、甚至是有危险情况发生的复杂地势中运动,在考古探测、军事侦察、地质勘探、抢险救灾等活动中有广阔的应用前景,同时因其具备强的低重力空间活动能力而在星际探索中更具运动优势,此外,研究跳跃机器人有助于对生物奔跑、跳跃运动机理的深入了解,对改善目前步行或爬行等迟缓运动方式有很好的启发意义,同时机器人的跳跃运动较其他类型的移动方式具有更高的能量利用率,其经济性更强,更具市场前景。
同类课题研究水平概述
- 国外对跳跃机器人的研究起步较早,Case Western Reserve University研究人员研制出由人工筋驱动的机械蟋蟀,机械蟋蟀的腿部是由高分子管状纤维编织成的人工筋,纤维内部通过微型空气压缩机充气,微控制器控制腿部微型阀门及空气压缩机,使人工筋做出绷紧与收缩动作,驱动机械蟋蟀行走与弹跳;日本Tohoku大学的Hyon和东京大学的TMita等人研制了类似狗腿型的机器人“Kenken”,该机器人的腿是由旋转关节连接三根连杆组成的整型腿,腿部采用液压驱动器模拟肌肉,大腿和脚之间采用线性弹簧模拟动物的键;日本东京大学研制了气动双足机器人“Mowgli”,Mowgli的人工肌肉骨骼系统由六个McKibben气动肌肉组成,其中包括双关节肌肉和两条腿,腿部有髋、膝、踝关节,以空气压缩机通过电磁阀控制气动肌肉实现400mm高度的稳定跳跃;美国NASA实验室组合了轮式移动和弹跳运动的优点,采用六连杆构造,把水平方向弹簧线形伸缩转化成机体方向的非线形拉伸和压缩,研制了间歇性跳跃式机器人,加入了远程遥控操作单元,大大提高了该弹跳机器人的实用性,但该弹跳机器人在落地位置不够平整时容易导致倾倒或翻转,其落地的稳定性还需改善。 国内对跳跃机器人的研究比较少,主要有上海交通大学杨煜普等人提出了一种具有翻转跳跃运动模式的单腿机器人,该翻转跳跃机器人仅由三个旋转关节构成,主要进行了轨迹规划和Poincare稳定性研究;北方工业大学何广平等研制的双臂弹性单腿跳跃机器人由两个驱动臂和一个弹性被动伸缩腿组成,主要探索了弹性欠驱动机械系统振动能量循环利用技术;西北工业大学葛文杰等从仿生学的角度,利用五杆闭环机构研制了仿袋鼠跳跃机器人,并进行了运动步态分析、结构优化及试验研究;哈尔滨工业大学研制的仿蛙跳跃机器人,通过传动箱的动力传动拉伸弹簧蓄能,放松后即可实现跳跃运动,仿蛙机器人的前腿用弹簧片替代,以保证器落地的稳定性。 综上,国外在弹跳机器人的研究领域已经做了大量工作并取得了较大的研究成果,且正从简单的跳跃机构逐步向多关节型、腿型等复杂的机器人系统发展,但是大部分处于试验研究阶段,理论成果还不成熟;国内弹跳机器人的研究起步较晚,尚处研制的初期阶段,与国外相比还有一定的距离。








