














基本信息
- 项目名称:
- 激光寻迹五自由度混合驱动机械手及监控
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
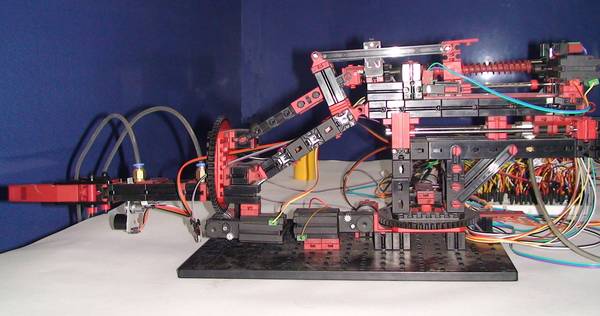
- 本机械手模型采用混合驱动,综合电机传动精度高及气压传动快的优势。六关节机械体可完成机身回转、手臂伸缩和俯仰、手腕升降和旋转5个自由度,以不同位姿实现对目标物体的抓取。基于激光调制技术的寻迹系统可搜寻、定位目标物体及距离检测。本机械手可实现各关节的点动,定点间单/双层物体和横/斜位姿物体的搬运、高低位置放置、单次/循环激光定位等自动控制,利用自行开发的监控软件进行数据采集、实时动画模拟等。
- 详细介绍:
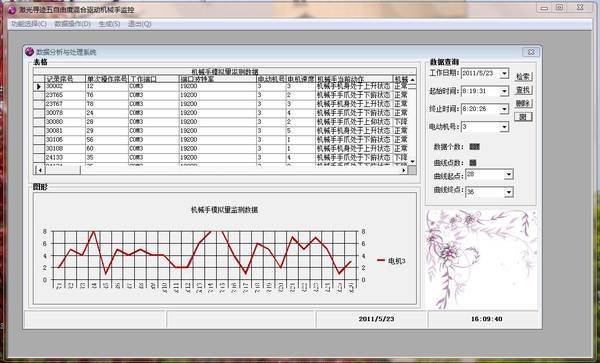
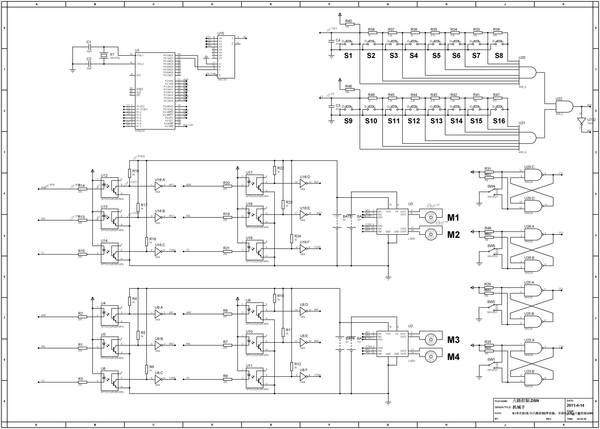
- 本激光寻迹五自由度混合驱动机械手由机械本体、驱动源、控制系统、检测系统、监控系统共五部分组成。 一、六关节机械体 机械本体采用模块化设计。机械手为了抓取空间中任意位置和方位的物体,需有6个自由度。一般专用机械手的自由度为2~3个,自由度越多,机械手的灵活性越大。本模型通过机械手传动机构及结构创新设计,实现了5自由度功能,其通用性广泛,可广泛用于机械制造业中机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,能适用目标物的各种位姿。 本机械手的运动由一个指关节运动(手指开、合)、两个直线运动(沿手臂方向的伸缩、沿竖直方向的升降)、三个转动(机械手绕水平轴的仰俯、绕水平中心轴的回转和机械体绕竖直中心轴的旋转)所组成,分别完成伸缩、升降、俯仰、回转、旋转5个自由度的动作。 二、混合驱动传动系统 本设计中机械手的驱动系统由四个电机、两个气缸共六个执行元件组成。传动方案可行性分析中,将各模块功能的拟草求解方案与其他可达到同样目标的可行性方案进行比较择优,最终确定各子功能解法为:机身、手腕旋转采用蜗轮蜗杆机构,手臂俯仰、升降采用螺旋副及连杆机构,分别由电机1、2、3、4驱动;手臂伸缩、手指开合采用气动装置,分别由气缸1、2驱动。 三、控制系统 本控制系统基于STC12系列单片机开发,根据控制需要搭建电路系统,采用光耦将控制电路与执行电路隔离,系统抗干扰能力大大提高,采用脉宽调制(PWM)实现对直流电机的无级调速。自行开发的控制器可以实现对机械手本体模型中的电机及汽缸的驱动控制,使之达到定位要求,实现对物料的搜寻、抓取、搬运等动作的自动控制。 四、基于激光调制技术的目标物检测系统 激光传感器由两部份构成,一部份为发射部份,一部分为接收部份。发射部份由一个振荡管发出180KHz 频率的振荡波后,经三极管放大,激光管发光;接收部份由一个相匹配 180KHz 的接收管接收返回的光强,经过电容滤波后直接接入单片机的I/O口,检测返回电压的高低。从而判断物体的位置信息,进行自动定位。 五、基于串口通讯的远程监控系统 本设计以混合驱动机械手控制系统为监控对象,采用VB语言自行编写监控软件,通过串口通信方式构建计算机监控系统,对机械手的工作状态进行实时监控。主要功能如下: 1.机械手点动测试和自动控制。 2、机械手运行状态动画模拟,向监控人员实时显示机械手状态 3.工作现场参数的实时显示,可将各关节运动的实时速度通过曲线形式显示出来。 4、电机速度设置,可通过监控面板对各电机的脉宽进行设置,从而调节电机运行速度。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 特殊工况环境中,具有远程监控功能的机械手可使人脱离恶劣的劳动条件,完成人体不能直接接触或难以接近的特殊作业。本作品综合电机驱动与气动的优势,设计出一种五自由度混合驱动工业机械手实体模型及监控系统,用于实现对抓取目标物的自动寻迹、按指定轨迹操作、现场数据采集与处理、同步动画监视等功能,以满足特殊环境下远程操控要求。 创新点:基于激光调制技术的目标寻迹系统可以精确的搜寻、定位目标物体的位姿。六关节机械体完成机身回转、手臂伸缩和俯仰、手腕升降和旋转5个自由度,以不同位姿实现对目标物体的抓取和操作。混合驱动综合了电机传动精度高及气压传动动作快的优势。 技术关键:自行开发的控制器用于机械手对物料的搜寻、抓取、操作等动作控制要求,基于串口通信的计算机远程监控系统实现工业现场工作状态的实时显示,数据数据处理和远程控制要求。 主要性能指标:机身旋转角度-90°~+90°,手臂升降高度0~150mm,俯仰角度:-35°~+5°,手腕旋转角度-180°~+180°,手臂伸缩0~50mm,、手指开合角度0~10°。
科学性、先进性
- 现代机械手执行部分常为电机驱动,但其价格较贵,限制了在一些场合的广泛应用。气动机械手结构简单、无污染、抗干扰性强。本作品综合了电机驱动与气动的优势,建立了一种五自由度混合驱动工业机械手模型及控制系统,利用电机传动控制精度高的特点实现机械手的准确定位,利用气压驱动优势实现快速接近及抓取物料的动作。 目前制造业中一些复杂的加工设备和产品,都可以通过串口进行控制和检测。实验室和工业应用中,串口常常作为计算机与外部串行设备之间的首选数据传输通道。本机械手监控系统即基于串口通信技术,采用VB语言开发的监控系统通过对工业现场机械手的五自由度控制,调整其位姿以适应不同目标物的定位、操作要求。 机械手对目标物的寻迹借助激光定位原理,融合单片机、传感器、调制解调和串行通信等技术,开发了一种对目标物的定位自动监测系统,利用串口通信在终端计算机上进行距离定位和监控。系统可靠性高、传输速度快、成本低、使用方便和维护性好,满足工程需要。
获奖情况及鉴定结果
- 2011年3月,在南阳理工学院第八届“挑战杯”大学生课外学术科技竞赛中获得一等奖。
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、产品,模型,现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点及优势:本机械手利用电机传动控制精度高的特点实现机械手的准确定位,利用气压驱动优势实现快速接近及抓取物体动作。基于串口通信开发的监控软件完成数据处理、显示及复杂的控制管理任务的监控,使操作人员能实时地监控系统工作情况。该方法成本低、针对性强。 适应范围及推广前景:本机械手可广泛用于各类生产线上,如现代汽车制造工厂的生产线,尤其是主要工艺的焊接生产线,彩电、冰箱等家用电器产品的装配生产线上等。加装激光传感器后,本机械手可在一定区域内自动搜寻物体、辨别物体是否在可操作区,对操作区域内的物体进行定位操控,因而又可作清障、搜寻等特种机械手。在监控软件的支持下,激光寻迹混合驱动机械手还可在震动、易燃、易爆、强磁、辐射等恶劣环境下工作,操作人员可以在安全区域进行远程控制与监视,从而满足特殊环境下的操作要求。 经济效益预测:本模型机械传动系统为创新型设计,控制系统与监控软件具有自主知识产权,将其扩充后可成为实际的工业生产线自动化设备,应用领域广泛、经济效益可观。
同类课题研究水平概述
- 机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。机械手为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度越多,机械手的灵活性越大。一般专用机械手的自由度为2~3个,本模型通过机械手传动机构及结构创新设计,实现了5自由度功能,其通用性广泛,可广泛用于机械制造业中机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,能适用目标物的各种位姿。 机械手的驱动方式目前常见的有液压、气动、电动、机械式等。现代机械手其执行部分常为电机驱动,但此类机械手价格较贵,限制了在一些场合的广泛应用。气动机械手结构简单、无污染、抗干扰性强。近20年来,气动技术在各种自动化生产线上得到广泛应用,电气可编程控制技术与气动技术相结合,使整个系统自动化程度更高,控制方式更灵活,性能更加可靠。本机械手模型采用混合驱动技术,综合利用电机传动控制精度高及气压驱动快的特点,实现对目标物的准确快速操作。 以设备控制器为终端、PC机为控制端的主从式计算机实时监控系统在现代工业设备中得到了广泛的应用。目前通用的工业控制装置(如PLC、单片机等)不足之处是不能提供给用户良好的人机界面。本系统开发的设备控制器完成对系统的底层控制,用计算机完成数据处理、显示及复杂的控制管理任务的监控系统,可使操作人员能实时地监控系统工作情况并使系统操作变得方便,操作人员可以在安全区域进行远程控制与监视,从而满足特殊环境下的操作要求。 传统的机械手对目标物体操控时常需首先保证目标物具有稳定的坐标位置,本系统中的目标物可在一定操作区内随机放置,通过激光传感器定位技术扫描目标物,确定目标体的距离。激光传感器采用调制处理,接收管只能接收相同频率的反射光,可以有效防止可见光的影响。通过激光传感器检测,可以精确的搜寻、定位目标物体。 综上所述,本激光寻迹五自由度混合驱动机械手灵活性大,结构紧凑,可靠性高,可实现对一定区域的随机位置目标物准确定位与操控。其监控系统基于串口通讯技术,通用性好,系统操作方便,在工业生产中特别是许多特殊环境中有着广泛的应用前景。








