














基本信息
- 项目名称:
- 强动力型月球车
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 月球车(亦称“月球探测远程控制机器人”)是在月球表面行驶并对月球考察和收集分析样品的专用车辆。针对月球表面复杂环境而设计各种独特机构和控制系统, 使该车具备强大的驱动力、优越的越障爬坡性能、平稳运动功能及很强的通过性能。 创新点及关键技术: 1八轮独立驱动系统 2八轮独立转向系统 3八轮臂协调垂直伸缩运动系统 4 “双子星”车体结构及协调控制系统 5双连杆柔性机械臂系统 6计算机远程监控及控制系统 7 摄像与红外温湿度探测系统 8混合能源供给系统 当前我国登月计划正在紧密的实施过程中,月球车的研究在不断深入,相信经过不断的完善,它定能在嫦娥工程中展示它优越的性能;由于其具备优越的灵活性,强大的驱动力,亦能适应沙漠环境,可作沙漠车使用;独立驱动与独立转向系统具有很大的研发前景,其应用于电动汽车可有效提高速度的限制、解决动力问题及能源匮乏问题;“双子星”车体结构可在一定空间内调整相对位置,在很大程度上提高了车体的灵活性,可应用于专用重量级运输车。 该作品为月球车行走系统、未来电动汽车、电动沙漠车、专用重量级运输车的发展方向提供了一种崭新的思路,存在广阔的开发前景。
- 详细介绍:
- 月球车(亦称“月球探测远程控制机器人”)是在月球表面行驶并对月球考察和收集分析样品的专用车辆。针对月球表面复杂环境而设计各种独特机构,增强了该车的适应能力。具备强大的驱动力、优越的越障爬坡性能、平稳运动功能及很强的通过性能。从而能高效率地完成各种月面探索活动的任务。 一.八轮独立驱动系统 打破传动独立驱动车的设计模式,即摒弃传统的同轴独立驱动,采用自由轮臂独立驱动,大大提高了该车对月球表面复杂环境的适应能力。此车精简传统汽车复杂的传动机构,直接由电动机输入动力,采用动力轮独立驱动机构进行传动, 每个轮子都有一个驱动电机驱动,电动机经过减速器直接将动力传送到轮上,可大大提高车速及马力,减少了复杂传动机构的能量损失,从而提高了能量利用效率,从而充分地利用了能源,并且解决了传统电动汽车速度偏慢的问题。 二.八轮独立转向系统 每个轮子都可独立任何角度转向,亦可整体协调一致转向,实现了车体的零转弯半径转弯,很大程度上提高了月球车的转向运动灵活性及整体运动灵活性。 三.八轮臂协调垂直伸缩运动系统 打破了传统汽车可调底盘的设计模式,轮臂设计采用液压缸,通过轮臂自动伸缩调节车体高度,达到了间接调节底盘的目的,在一定范围内可保持车体的水平,实现减震功能;该系统亦能保证每个轮子在凸起或凹陷的环境条件下做仿形运动,实现了主动控制,提高了车对月面的适应性能,即整车通过性能。 四.“双子星”车体结构及协调控制系统 两个车体通过液压伸缩连杆机构连接成一体,球铰链与轴承配合连接,两节车体可以在一定空间范围内自由运动,实时调整相对位置,在遇到障碍时通过将传感器所获得信息经无线传输至主控PC机,主控PC机使用图像识别和分析技术获得对象物体的形状和位置信息,在人工指明目标物后,主控PC机经人工智能(模式识别、路径规划、轨迹避碰等)计算;将控制指令通过无线传输给车体嵌入式控制计算机,自动控制车体运动,可实施相互救助。另外,可以根据实验的需要增加相应的车厢,犹如火车的车厢挂接,由于每节车厢的驱动系统是相对独立的单元,即使其中某个车厢动力发生问题,也不会影响整个车体的正常运行。 五、双连杆柔性机械臂系统 轮式的车可以高速行驶,但不适应特别复杂的地形环境,足类行工具正好弥补了这个缺陷。该机械臂为六自由度机械臂,适用可作为月球车行走工具,亦可为月球车排除障碍物、开辟道路,增强了月球车对复杂环境的适应能力。另外,双连杆柔性机械臂通过计算机控制实施采样工作,故还可作为采样工具使用。 六.计算机远程监控及控制系统 控制系统由三部分组成,即传感器部分、双车体、操作控制台组成。传感器部分包含宽接入、多信息融合器。宽接入、多信息融合基于ARM9系统,由12位精度以上A/D、32路I/O、RS232通讯接口组成,能融合多种传感器信号;双车体包含嵌入式控制计算机和各关节伺服电机,能驱动各轴,分配各轴运动,处理和控制各种状态量;操作控制台部分包含主控PC机、指令解码器、图像解码器、无线接收发射器等。CCD摄像机和超声波传感器所获得的图像信息、障碍物信息,经无线传输至主控PC机。在人工指明目标物后,主控PC机将控制指令通过无线传输给双车体嵌入式控制计算机,自动控制双车体协调运动。 七.摄像与红外温湿度探测系统 主要包括两个CMU 2+摄像头、视觉传感器、温湿度传感器、温湿度探头、遥控接收/发射器、驱动电路等组成,能够能够跟踪和监视高对比度的区域,运动监测,颜色识别以及检测,跟踪。同时还能输出不同的视频格式到计算机进行额外的图像处理。 八.混合能源供给系统 车体上方安装有太阳能电池板,电池板的伸展方向始终与太阳光直射方向保持垂直,保证最大的光照面积,有太阳能自动追踪系统控制;在白天可有效补充能量,超容量锂电池可间断的充电放电,提供充足的能量供给。并且不产生任何废弃物,体现了太空环保的理念。 该作品为月球车行走系统、未来电动汽车、专用重量级运输车、电动沙漠车的发展方向提供了一种崭新的思路,存在广阔的开发前景。
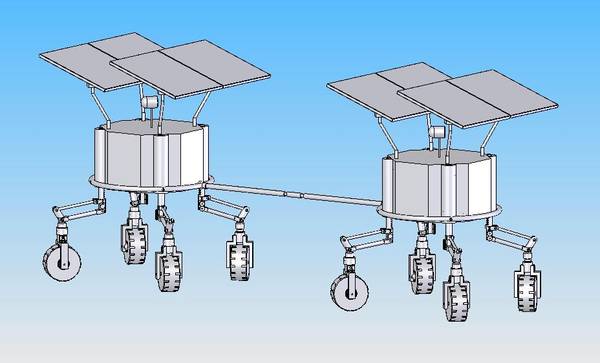
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 强动力型月球车打破了传统汽车和越野车的设计模式,针对月球表面复杂环境而设计各种独特机构和控制系统,具备强大的驱动力、优越的越障爬坡性能、平稳运动功能及很强的通过性能。 创新点:一.八轮独立驱动系统 打破传统独立驱动车的设计模式,采用自由轮臂独立驱动,增强了车轮的动力及灵活性。 二.八轮独立转向系统 每个轮子都可独立任何角度转向,亦可整体协调一致转向,可以实现车体的零转弯半径转弯,很大程度上提高了转向运动灵活性。 三.八轮臂协调垂直伸缩运动系统 打破了传统汽车可调底盘的设计模式,通过轮臂伸缩调节车体高度,可做仿形运动,实现了主动控制,提高了整车通过性能。四.“双子星”车体结构及协调控制系统 两节车体可以在一定空间范围内实时调整相对位置,主控PC机将控制指令通过无线传输给车内嵌入式控制计算机,自动控制车体运动,可实现避障或相互救助。 技术关键: 一、双连杆柔性机械臂系统 该机械臂为六自由度机械臂,可作为月球车行走工具,亦可为月球车排除障碍物及实施采样工作。 二.计算机远程监控及控制系统 控制系统由三部分组成,即传感器部分、双车体控制部分、操作控制台组成,自动控制双车体协调运动。 三.摄像与红外温湿度探测系统 主要包括两个CMU 2+摄像头、视觉传感器、温湿度传感器、无线接收/发射装置和驱动电路组成,能够探测和运动监测。 四.混合能源供给系统 太阳能电池板的伸展方向始终与太阳光直射方向保持垂直,保证最大的光照面积;锂电池可间断的充放电。
科学性、先进性
- 强动力型月球车不但继承了传统月球车的优势,也进行了突破性的创新设计,在各种机构设计方面打破了传统的设计模式。八轮独立驱动系统、独立转向系统使其具备强大的驱动力及灵活性;八轮臂协调垂直伸缩运动系统,通过液压轮臂自动伸缩调节车体高度,实现主动仿形运动,提高整体协调性;“双子星”车体结构,两节车体可以在一定空间范围内自由运动,实时调整相对位置,在遇到障碍时可实施相互救助。双连杆柔性机械臂通过计算机控制实施采样及行走功能;计算机远程监控及控制计算机实现远程无线独立控制及协调控制;摄像与红外探测系统,能够完成图像采集,无线视频控制及红外探测的功能;混合能源供给,超容量锂电池与太阳能电池板可间断的充电放电工作,提供充足的能源供给。车体结构对称性好,不论前进、后退其动力性能都能保证一致,克服了有些月球车在前进或倒退中动力性能不一致的弊端。综上所述,该月球车能高效率地完成月面探索活动的任务。
获奖情况及鉴定结果
- 2008年5月,获得校SRTP项目基金资助 2009年3月,在校“挑战杯”大学生课外学术科技作品竞赛中获得一等奖 2009年5月,在省“挑战杯”大学生课外学术科技作品竞赛中获二等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 使用权转让
作品可展示的形式
- 实物 图纸 现场演示 图片 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点: 1八轮独立驱动系统 2八轮独立转向系统 3八轮臂协调垂直伸缩运动系统 4 “双子星”车体结构及协调控制系统 5双连杆柔性机械臂系统 6计算机远程监控及控制系统 7 摄像与红外温湿度探测系统 8混合能源供给系统 优势: 1控制系统稳定性及可操作性强 2能量利用率高 3动力强大 4机动灵活性强 5环保节能 6双重行走系统 适应范围: 1空间探索工具 2沙漠环境工具 3电动汽车 4专用重量级运输车 推广场景:其各种独特机构及控制系统,提高了车的适应能力,可作为月球车行走系统;由于其具备优越的灵活性,强大的驱动力,亦能适应沙漠环境;独立驱动与独立转向系统具有很大的研发前景,其应用于电动汽车可有效提高速度的限制;“双子星”车体结构可在一定空间内调整相对位置,在很大程度上提高了车体的灵活性,可应用于专用重量级运输车。 该作品为月球车行走系统、未来电动汽车、专用重量级运输车、电动沙漠车的发展方向提供了一种崭新的思路,存在广阔的开发前景。
同类课题研究水平概述
- 为了使月球车在月面上能够顺利行驶,美国、前苏联曾发射了一系列的卫星探测,并对月面环境进行了反复的科学实验,为在探测器上携带月球车的成功打下了可靠的基础。科学家对经由月球车月面的实地考察所带回的宝贵资料进行了分析研究,大大深化了人类对月球的认识。1970年11月17日,苏联发射的 “月球”17号探测器把世界上第一台无人驾驶的月球车── “月球车”1号送上月球。此车约重1.8吨,在月面上行驶了10.5公里,考察了8万平方米的月面。此后苏联送上月球的 “月球车”2号行驶了37公里,并向地球发回了88幅月面全景图。1971年9 月30日,美国 “阿波罗”15号飞船登上月球,两名宇航员驾驶月球车行驶了27.9公里; “阿波罗”16号、17号携带的月球车,分别在月面上行驶了27公里和35公里,并利用月球车上的彩色摄像机和传输设备,向地球实时地发回宇航员在月面上活动的情景及离开月球返回环月轨道时登月舱上升级发动机喷气的景象。 目前各国相继开始增强空间技术的投资力度,努力争取在不久的未来在外太空占有自己的一席之地,美国的空间技术一直处于世界前列,2008年6月,为了尽快重返月球,美国宇航局推出了首辆月球车样品,名为“战车”(Chariot)。“战车”从开始研发到完工只花了一年时间,有12个轮子,由2个电动马达驱动,可两级变速。欧洲航天局也在不断加强对月球车研制技术的深入。 我国的嫦娥工程已经启动,月球车在空间探索中起着重要作用。国内已有近20所高校及相关科研院所对我国月球车进行了研究,有些已经取得了一定的成果,但是此前所设计的月球车基本都是在传统月球车的基础上进行了一定的改进,但并没有打破传统的设计模式,以致无法突破技术壁垒,在实际运用过程中出现很多问题。例如某月球车在陷入月球撞击坑时失去联系,导致一次探月行动的重大损失。针对以上问题,我们研发了“双子星”车体结构及协调控制系统,在遇到障碍时可通过计算机监测并调整运行路线实现避障及相互救助。








