














基本信息
- 项目名称:
- 叶片轮式蛇形机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 叶片轮式蛇形机器人采用叶片轮驱动,比一般的蛇形机器人具有更好的翻越和攀爬能力,能够适应各种复杂的地面环境,同时具有结构简单、操作方便、速度快、成本低的特点。 该机器人由控制者通过无线摄像头传回的图像进行遥控控制,能够脱离视线范围工作,根据环境的不同可搭载不同的传感器完成各种任务。主要可用于地震废墟下搜救伤员,在军事上侦察敌情,公安部门反恐,核工厂、危险化学药品生产工厂危险区域检测等。
- 详细介绍:
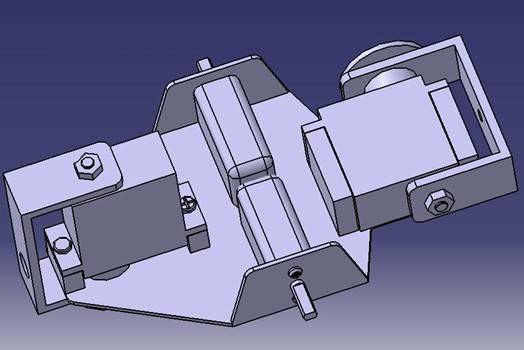
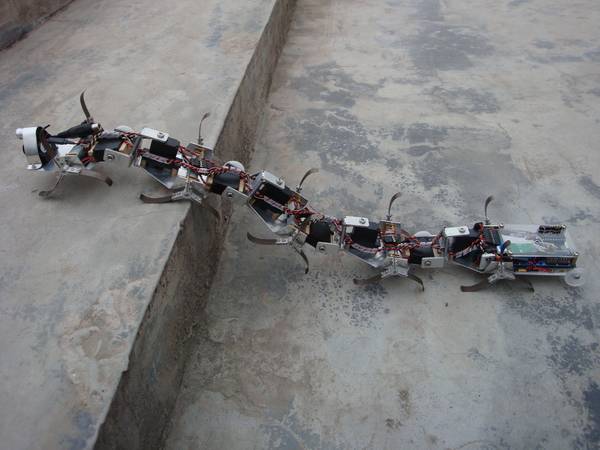
- 叶片轮式蛇形机器人由姿态控制系统、移动系统、遥控控制系统、无线视频系统、电源系统五个部分组成。 姿态控制系统:本叶片轮式蛇形机器人设计为5节,约半米长,共有4个关节,每个关节有三个自由度,两个可控制自由度,一个自平衡旋转自由度,通过控制关节处的舵机实现蛇形机器人姿态的改变。 移动系统:通过10个直流减速电机驱动10个叶片轮前进,比轮式驱动更容易越过障碍物。每个叶片轮由三片弹簧片成两两120度固定于轮轴上而成,每片都略微向后弯曲,以防止前进时将杂物卷起卡住叶片轮。 遥控控制系统:包括无线遥控发射器和无线遥控接收器。控制者通过无线摄像头传回的图像了解蛇形机器人周围地形情况,使用无线遥控发射器将控制信号传送给无线遥控接收器。 无线视频系统:通过无线摄像头将蛇形机器人周围图像传送到控制者的显示设备上,实现超视距控制。 电源系统:采用两块3.7V的锂聚合物电池串联供电。 本蛇形机器人头部安装有无线摄像头和高亮LED灯(在黑暗环境下使用),由控制者通过无线摄像头传回的图像对其进行遥控控制,能够脱离视线范围执行任务。其采用的叶片轮式驱动能够比常规的驱动方式(如轮式驱动、履带式驱动)提供更佳的驱动能力和越障能力,每个关节有三个自由度(一般只有两个),能够取得更好的运动效果。在不改变机身的情况下,可以通过更换不同的驱动机构来适应不同的运动环境,实现运动效率的高效化。 本蛇形机器人可搭载各种传感器,用于地震废墟下搜救伤员,在军事上用于侦察敌情,公安部门用于反恐,核工厂、危险化学药品生产工厂用于进入危险区域检测,外星探测等。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的:设计制作出一款相比现有蛇形机器人驱动能力和越障能力更强,能更有效用于地震废墟下搜救伤员,在军事上侦察敌情,公安部门反恐,核工厂、危险化学药品生产工厂危险区域检测和外星探测等任务的蛇形机器人。 基本思路:基本思路是设计一种叶片轮来产生前进的驱动力,这种叶片轮能够将路面凸起或者小的障碍物卡在两叶片之间,产生很大的摩擦力驱动蛇形机器人前进,越障能力大大提高,且将驱动机构模块化,可以根据不同的情况使用不同的驱动机构达到更好的运动效果。此蛇形机器人设计为5节,共有4个关节,每个关节有三个自由度。 创新点、技术关键:1.采用叶片轮驱动,能够比常规的驱动方式提供更佳的驱动能力和越障能力。 2.每个关节设计了三个自由度,关节处的旋转自由度能够使叶片尽量贴近地面,得到更好的运动效果。 3.将驱动机构模块化,可以根据不同的情况使用不同的驱动机构达到最好的运动效果。 4.配置了无线视频系统,能够脱离视线范围执行任务。 5.能够搭载多种传感器模块,更换传感器模块就能实现不同的功能。 主要技术指标:能够超越现有大多数蛇形机器人的越障能力,能越过自身高度3倍以上的障碍物;运动速度快,结构简单,控制简单;能够进入狭小空间执行任务,攀爬楼梯,在崎岖的路面运行;有较强的负重能力,能够搭载各种传感器,用于搜救、侦察、反恐、进入危险区域探测等。
科学性、先进性
- 第1类蛇形机器人是利用关节来产生驱动力形成仿蛇的曲线运动,这种结构在平地能够达到较好的运动效果,但是在复杂地面和小的管道内却不能有效前进,原因在于这种结构的蛇形机器人身体必须不断扭动才能产生驱动力,当身体周围空间有障碍物限制其扭动时,便不能产生足够的驱动力使自身前进,所以第1类蛇形机器人不适合在凹凸不平的自然环境中工作。 第2类蛇形机器人用轮子或者履带来产生驱动力,越障能力比第1类效果要好,但轮式驱动在崎岖路面运动时轮子容易打滑,越障能力还不够强;履带式驱动在崎岖路面运动的效果虽然优于轮式驱动,但是其结构复杂。 本作品设计一种叶片轮来产生前进的驱动力,叶片轮能够将路面凸起或者障碍物卡在两叶片之间,产生很大的摩擦力驱动蛇形机器人前进,越障能力能够大大提高。 每个关节有三个自由度,两个可控制自由度和一个自平衡旋转自由度,这样能够得到更好的运动效果。 将驱动机构模块化,可以通过根换不同的驱动机构来适应不同的运动环境,实现运动效率高效化。
获奖情况及鉴定结果
- 2009年5月参加重庆市团委、重庆市科协、重庆市教委、重庆市学联举办的第十一届“挑战杯”全国大学生课外学术科技作品竞赛重庆赛区决赛中荣获特等奖。
作品所处阶段
- 叶片轮式蛇形机器人已制作出实物模型,并完成了实验测试,达到预期设计目标。
技术转让方式
- 非商业性技术转让
作品可展示的形式
- 实物、产品、模型、图纸、磁盘、现场、演示、图片、录像、样品都可。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点和优势:本蛇形机器人头部安装无线摄像头,由控制者通过无线摄像头传回的图像对其进行遥控控制,能够脱离视线范围执行任务。其采用的叶片轮式驱动比常规的驱动方式有更佳的驱动能力和越障能力,每个关节有三个自由度,能够取得更好的运动效果。在不改变机身的情况下,可以通过更换不同的驱动机构来适应不同的运动环境。 适用范围及推广前景的技术性说明:本蛇形机器人可用于可搭载各种传感器,用于在地震废墟下搜救伤员,在军事上用于侦察敌情,公安部门用于反恐,核工厂、危险化学药品生产工厂用于进入危险区域检测,外星探测等。其拥有环境适应能力强,结构简单,控制方便,成本低和稳定性好的特点。 市场分析和经济效益预测:目前全国公安、消防部门的监测、反恐、搜救类机器人价格昂贵,数量少,适应复杂地形能力差,操作复杂,维护费用高,而且相关的地震救援部门也没有相应功能强大的救援机器人。蛇形机器人如果用于上述部门和军事侦察、空间行星地表探测等方面,将产生巨大的直接和间接经济效益。
同类课题研究水平概述
- 当今世界上研制出来的蛇形机器人按结构形式可以分为两类: 第1类是由刚性杆组成的链状结构,运动由关节之间的扭动作用产生。 第2类是由带有轮子或者履带的模块串连而成,运动直接由轮子、履带驱动产生。 日本的Hirose教授研制出了世界第一台蛇形机器人,其领导的Hirose Fukushima Lab 实验室研制开发的水中蛇形机器人,能够在水下以蛇形方式自由地游泳。其研制的另一种救援蛇形机器人长1.2米,由3节组成,用6个履带爬行。 美国宇航局于1999年开始研究多关节的蛇形机器人,计划在其太空计划中用于行星地表探测以及空间站维护工作,其第三代蛇形机器人能完成蠕动前进,游动前进,翻越简单障碍物等功能。 德国人Gavin.H从约1997年开始从事蛇形机器人的研究工作,到目前为止共设计并制作了S1~S7七代蛇形机器人。S5已经达到相当高的水平,特点是:各个关节形状尺寸不同,高度模拟生物蛇;但为二维结构,无法完成三维空间运动;依靠从动轮而不是摩擦运动,运动速度很高。 挪威SINTEF研究基金会的波尔.利尔杰贝克等人日前研制成功了一种形似蟒蛇的消防机器人。这种被称为的“安娜.康达的蛇形机器人长度为3米,重量约70公斤。该机器人的能量供给方式也非常奇特--它能够直接从消防水带中获取前进的动力,使得机器人能够像蛇一样灵活的移动。 近年来,国内也开展了对蛇形机器人的研究工作,国防科大的RoboSnake是国内最早报道的蛇形机器人,最初为二维结构,依靠从动轮前进,长约1.5米,重约3Kg,目前发展为三维结构,但是依然保持从动轮。中国科学院沈阳自动化所开发出了一种实现三维空间运动的蛇形机器人,同样采用正交串联结构,可以完成蠕动前进、游动前进、滚转等运动。 对比以上各种蛇形机器人,目前的第1类和第2类蛇形机器人都具有各自的优缺点: 第1类蛇形机器人的优点是能够在平坦地面实现仿蛇运动,还能实现翻滚动作,卷住柱状物蜿蜒而上,穿上外衣能在水中游泳等,缺点是大多只能在平的地面游动,而不能实现翻越障碍物等功能,适应自然环境运动的能力不强且控制复杂。 第2类蛇形机器人的优点是越障能力强,控制简单,但不易实现第1类蛇形机器人的某些动作。








