














基本信息
- 项目名称:
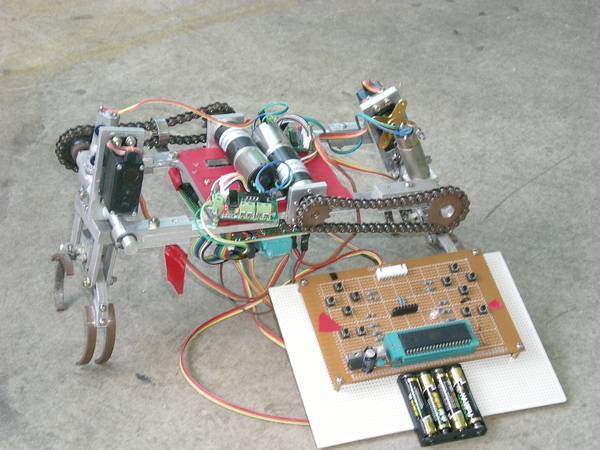
- 全向爬管道机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 采用嵌入式芯片通过手持遥控设备或个人计算机通过无线遥控的方式实现整个机器人的控制。用于高空处人无法攀登或危险性比较大的管状结构的勘察。用于维修管道结构建筑,以及以机器人为平台,可以搭载可燃性气体传感器和温度传感器等;当管道有泄露现象时,通过传感器检测确定,然后向控制人员发出报警,并通过无线数据传输模块发回检测数据。 随着现在空中管道布局越来越复杂,我们的这款全向外管道检测机器人将为各种管道检测修理带来一次新革命。
- 详细介绍:
- 当今管道泄漏、出故障等带来的环境危害、资源浪费越来越多,而且伴随管道泄露的检测难度也越来越大,一款可遥控的爬管道检测机器人的已很有需要。 当前一些爬外管道机器人无法跨越法兰、实现转弯、跨越交叉或平行的两管道等弊端,基于此我们设计了一款可实现全角度转向,可跨越式前进的爬管道机器人并携带检测模块。 通过舵机控制手臂的抓紧与松开,主板上电机通过链传动实现机器人整体的翻转。转向电机驱动爪子转向实现的各种角度的转向。 采用手持遥控板或者个人计算机通过有线或者无线遥控的方式控制机器人前进。 以机器人为平台,装有可燃性气体传感器;当管道有泄露现象时,通过传感器检测确定,然后向控制人员发出报警,并发回检测数据。 随着现在空中管道布局越来越复杂,我们的这款全向爬管道并检测的机器人将为各种管道检测修理带来一次新革命。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本作品可实现全角度转向,可跨越式前进适应各角度的爬管道机器人并携带检测模块。 通过有线或者无线遥控方式达到控制机器人各种动作。 电机驱动链轮带动机器人的前进后退。另一个电机驱动实现机器人的转向。舵机带动连杆实现手爪的张开与闭合。 通过单片机计算分析传感器采集的数据,判断是否报警。
科学性、先进性
- 1.翻转实现自身的前进后退; 2.单片机编程遥控电机的实现翻转; 3.舵机的拉伸完成手臂抓紧和释放; 4.突破爬杆机器人跨越法兰等障碍的功能; 5.实现当机器人遇到分叉管等岔口时能转向; 6.实现任意角度的杆与杆之间的跨越式前进; 7.实现不同管直径的攀爬,提高了其适应能力;
获奖情况及鉴定结果
- 2009年6月 辽宁沈阳东北大学 第九届“挑战杯”辽宁省大学生课外学术科技作品竞赛一等奖
作品所处阶段
- 作品已经完成实物,成品正在调试
技术转让方式
- 协商转让
作品可展示的形式
- 实物演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 在管道上可全角度转向、跨越法兰和跨越两管道前进。以机器人为平台可携带各种的管道检测传感器。
同类课题研究水平概述
- 无








