














基本信息
- 项目名称:
- 多腔体负压式爬壁机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本产品区别于以往同类型机器人,利用连续负压原理,采用多腔体吸附结构,具有对壁面结构形状适应能力强,稳定性好,不受壁面材料限制,移动灵活等特点。有很好的应用前景。
- 详细介绍:
- 随着城市高层建筑不断出现,随之而来的是高层作业的问题。由于爬壁机器人工作的特殊性,受到世界各国科研工作者的关注。 区别与以往的爬壁机器人,我们采用连续负压原理可以很好的克服机器人对墙体的适应问题,同时采用轮式驱动和差动转向的方式,使机器人具有很好的运动连续性;受章鱼多吸盘的启发,创新性设计了多腔体结构,提高了机器人工作过程的可靠性和适应性。真空补气阀装置的创新构想使机器人行走驱动力更加稳定,增加了机器人对不同壁面的适应能力。从而拓宽了爬壁机器人的应用范围。 随着国家经济水平的不断提高,将有更多的涉及到高空作业的工作,爬壁机器人的应用领域也会有着越来越广阔的前景。
作品图片



作品专业信息
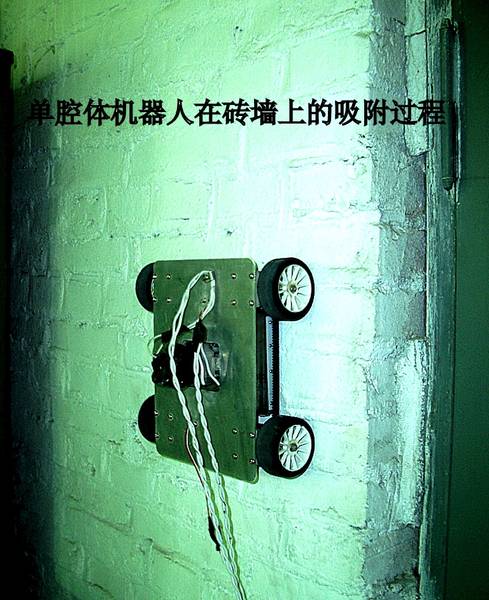
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
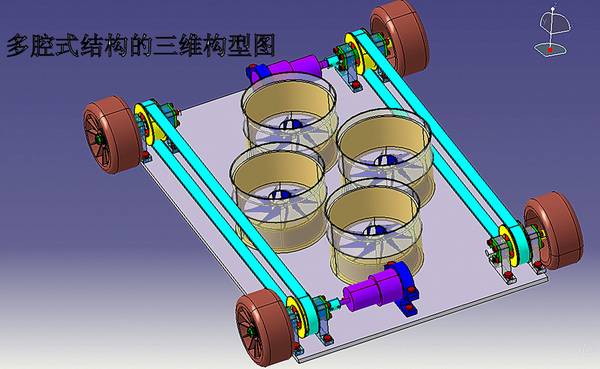
- 随着高层建筑不断出现,高层建筑作业问题凸现重要。研制一种对壁面结构形状适应能力强、移动灵活的新型爬壁机器人具有重要的意义。本项目利用高速电机带动的风扇,抽取机器人与壁面之间密封腔内的气体。使密封腔内产生连续负压。使机器人完成吸附的过程。 创新点: 1、多腔体负压结构。将机器人单一的密封腔体化为多个独立、密闭的腔体增加机器人工作稳定性。当某个腔室失效时,其余腔室仍保持一定的吸附力。2、真空补气阀结构。不同墙体,吸附力大小不同。当密封腔内形成的真空度达到设定数值时,补气压阀会自动打开,使机器人产生合适的吸附力。3、连续负压原理。利用连续负压原理,采用轮式行走,解决了传统爬壁机器人移动连续性差,控制复杂的缺点。 技术的关键: 1、多腔体机构设计:密封腔体的数量、形状、排列等对整机吸附力的产生有重要的影响,通过仿真计算及实验测试优化密封腔结构是本项目的关键。2、密封形式、结构设计:密封机构通过自身形变与墙体上的障碍、缝隙相适应,使机器人可在粗糙壁面上完成吸附功能。密封机构的形式、结构设计非常重要。3、机器人结构轻量化设计:优化结构、合理选材、降低重量,对于降低能耗,提高机器人负载能力十分重要。4、控制系统设计:设计合理的驱动调速,行走转向遥控系统,提高机器人的控制可靠性。 主要技术指标: 最大负压40KPa,整机质量1.8kg,吸附电机转速11000rpm,驱动电机牵引力>32N,负载力>14N。
科学性、先进性
- 传统爬壁机器人主要有真空吸附和磁吸附两种形式:真空吸附式机器人的缺点是当壁面凸凹不平时,容易使吸盘漏气,从而使吸附力下降,承载能力降低,当遇到壁面有大的裂纹和砖缝时,机器人不能完成吸附动作。磁吸附方式对壁面的凸凹适应性强,且吸附力大,但要求壁面必须是导磁材料。这两种机器人又同时具有移动连续性差,工作效率低等问题。以上两种爬壁机器人由于使用条件的要求,严重地限制了爬壁机器人的应用环境。 区别与以往的爬壁机器人,我们采用连续负压原理可以很好的克服机器人对墙体的适应问题,同时采用轮式驱动和差动转向的方式,使机器人具有很好的运动连续性;受章鱼多吸盘的启发,设计了具有创新性的多腔体结构,提高了机器人工作过程的可靠性和适应性。真空补气阀装置的创新构想使机器人行走驱动力更加稳定,增加了机器人对不同壁面的适应能力。从而拓宽了爬壁机器人的应用范围。
获奖情况及鉴定结果
- 本作品于2009年6月在2009年“挑战杯”吉林省大学生课外学术科技作品竞赛中取得特等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、图纸、磁盘、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本产品区别于以往同类型机器人,利用连续负压原理,采用多腔体吸附结构,具有对壁面结构形状适应能力强,稳定性好,不受壁面材料限制,移动灵活等特点。机器人控制利用遥控器操作,控制灵活方便,有很好的应用前景。 随着城市高层建筑不断出现,随之而来的是高层作业的问题。目前爬壁机器人应用主要集中于以下几个领域:在核工业中,用于对核废液罐、反应堆压力罐进行裂缝检查,测厚及焊缝探伤等;建筑行业中,用于对巨型壁面的喷涂,玻璃壁面的清洗,磁砖安装,桥梁探伤等;消防部门中,用于输送救助物资;石化行业中,用于对圆形大罐或球形罐的内外壁面进行检查、测量和保养;造船行业中,用于对船体的除锈、喷涂等。 随着国家经济水平的不断提高,将有更多的涉及到高空作业的工作,爬壁机器人的应用领域也会有着越来越广阔的前景。
同类课题研究水平概述
- 爬壁机器人作为机器人的一个特殊分支,其特点是能克服重力作用在墙壁、天花板上自由运动。由于爬壁机器人工作的特殊性,受到世界各国科研工作者的关注。从20世纪80年代中期开始,世界各发达国家相继研制出各具特色的爬壁机器人。如何实现有效吸附,是爬壁机器人最为关键的研究内容。目前主要采用负压吸附、磁吸附和仿生吸附三种吸附技术。 仿生吸附方式爬壁机器人:一些昆虫在光滑表面能抵抗超过它们自身重力百倍的分离力并在这些表面上自由行走,给爬壁机器人的吸附机构设计带来了启示。如美国斯坦福大学研制的“粘虫”爬壁机器人stickybot,其足底装有人造毛,能确保足底和墙体接触面积增加。 磁吸附方式爬壁机器人:磁吸附式爬壁机器人,可产生很大的吸附力,但只适合在导磁面上吸附工作。1984年,日本日立制作所研制出足式磁吸附式爬壁机器人。东京工业大学研制的Disk Rover永磁吸附轮式爬壁机器人。我国上海交通大学、哈尔滨工业大学研制开发出履带移动方式和永磁吸附方式爬壁机器人。 负压吸附方式爬壁机器人:负压吸附爬壁机器人是通过吸盘内外负压差作用,在壁面产生吸附力,但负压发生装置的类型具有多样性,其机理也各不相同。进行研究工作较早的有外接负压源的爬壁机器人,日本东京工业大学开发的NINJA系列4足关节式爬壁机器人,北京航空航天大学研制的Sky cleaner 3机器人等,机器人通过吸盘组的交替吸附和臂的相对运动实现运动。 真空泵应用在本体中的机器人用的一般是微小型往复式真空泵,由于真空泵可产生较高的真空度,面积较小的吸盘产生的吸附力就足以使机器人吸附在光滑的壁面上。美国密执根大学、哈工大研制的微小型尺蠖式机器人样机都采取了微型真空泵吸附足机构。 应用离心风扇的爬壁机器人是利用电机转动带动风扇高速旋转,抽出机器人负压腔内的空气形成负压提供吸附力。在粗糙壁面上具有较大的吸附力和较好的运动能力。由于其良好的壁面适应能力,受到了广泛的关注。意大利研制的ALICIA爬壁机器人, 负载为15kg,能跨越10mm高障碍。哈尔滨工业大学、上海交通大学、北京航空航天大学研究的爬壁机器人,性能存在相类似之处。机器人采用了吸尘器的风机作为负压发生装置,具有良好的墙壁适应能力, 此外还有文丘里管式和模拟龙卷风式等。








