














基本信息
- 项目名称:
- 智能小车
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 此智能小车是基本单片机为核心,设计小车的开发平台,作品的设计将前沿的电子器件、市场应用热点与基础理论有效地结合起来,既能检验理论学习效果、又能在动手实践中检验学生对元件的利用程度,设计的创新性、技术复杂度及实用性,激发学生的创新灵感。基于此平台可以设计出各种各样的生活实用装置,如智能控制轮椅,盲人导行车。
- 详细介绍:
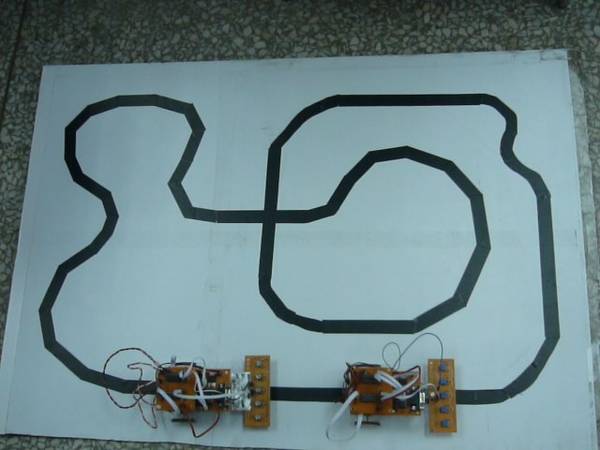
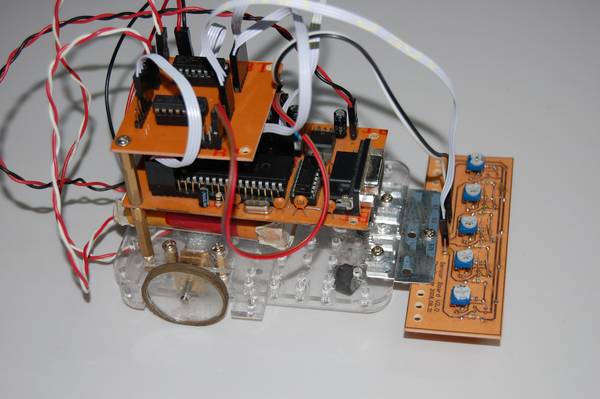
- 小车的模型为后两轮驱动,前轮只采用一个万向轮作为方向的变动。车体为长方形。车体的后两个轮分别由不由的减速电机控制,当两个后轮以相同的速度向前转动时,小车向前行驶;当两个后轮以相同的速度向后转动时,小车向后行驶;当左后轮向前运动,而右后轮不动,则小车以右后轮为中心,向右转;当右后轮向前运动,而左后轮不动,则小车以左轮为中心,向左转;当左右后轮以不同的速度运动时,小车以左或右的方向拐弯。还可以设定两个后轮不同的方向运动,来实现原地旋转。但在安装时,为了保证上述功能可靠,后两轮的轴心一定要对齐。 小车的模型只有机玻璃激光切割所得,主要有车底盘,电机固定盘,两个轮子,和一个万向轮。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 近期目标:开设单片机等工程问题的编程训练,进而参加专业的电子科技设计大赛等相关赛事。 中期目标: 与生产公司联合设计具有二次开发特色的智能机构模型,参加相关的比赛。 长期目标: 在实现中期目标的基础上,联合企业, 以结合现场中遇到的实际问题,设计具有实用性强,应该于生活中的某些场合,如设计以小车的核心部件为底座的轮椅,盲人车。 创新点:自动寻光,自动避险,多机通讯控制 技术关键:传感识别、记忆算法
科学性、先进性
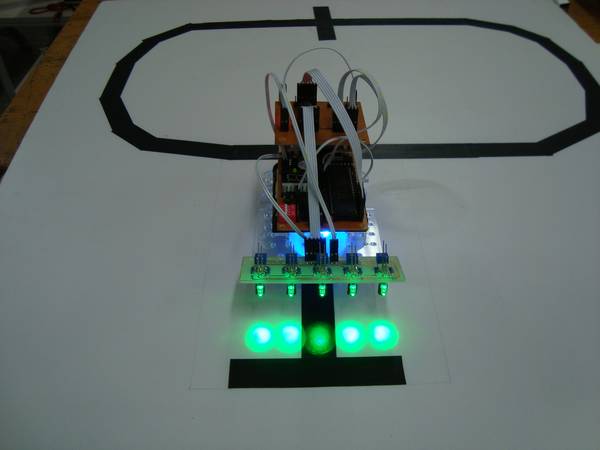
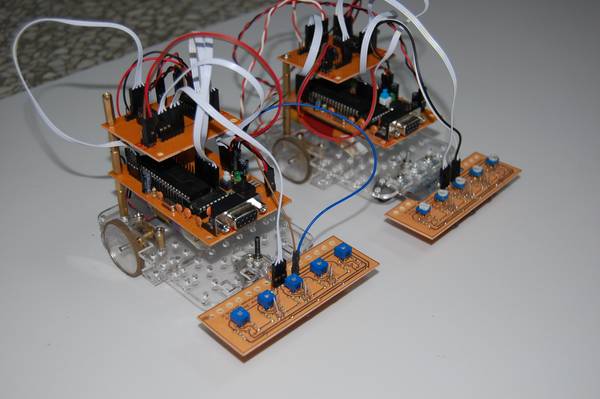
- 基于飞思卡尔杯智能车大赛与及瑞萨超级车模大赛中的自动寻迹小车,设计智能小车在黑白路径行走。本设计在此的基础上,增加了更加丰富的功能,除了自动寻迹外,本小车还具有自动寻光,自动避障,自动寻声等功能。 本小车与全国大赛中的智能车相较,还具有灵活的机械活动特性,可以快速起制动,原地180度转弯,由于其体积小巧,可以在很少的面积内,完成车身的动作。 本小车中所有的设计均以模块化的形式构成,设计的功能,只要组合相应的功能模块。
获奖情况及鉴定结果
- 作品中采用的最小系统板实验板,和各个模块在飞思卡尔以及瑞萨MCU比赛中都发挥比较重要的作用;以其新颖的设计获得相应的奖项,该作品50套已经作为我校大学智能车大赛车模,受到老师和同学的认可与欢迎。
作品所处阶段
- 生产阶段
技术转让方式
- 电子文档 实物
作品可展示的形式
- 实物 图片 图纸 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:以单片机最小系统板为核心,把设计的相应功能模块相接起来,编写相应的功能程序,即可对智能车进行控制。 特点及优势:1.性价比高,适合用于高校的智能车开发平及校内大学生的智能车比赛的套件。2.高性能,本小车融合了机电一体化,传感器应用技术,计算机控制,人工智能,运动控制及通讯技术,以实现多车协调控制。3.可开发性,可基于此小车的底层灵活控制特点,可设计自动归位垃圾简等等,可以设计远程监控小车应用于危险的场合。 适用范围及效益分析:学生科技创新能力的培养,适用于电气类大学生开展“群众性”科技创新电子设计大赛活动。在教学方面,为学校提供理论与实践相结合的教学模型,激发学生的科技创新能力,最终会以高端科技产品而上市。例如用于检测,测量,娱乐等。随着产品的不断完善, 在该产品的基础上增加传感器,如红外、灰度、温度、气体等实现以机器人为主题的简单大赛,如机器人搜救,以及现在比较成熟的机器人足球大赛等。
同类课题研究水平概述
- 此小车的模型是模拟日后的智能汽车加高速公速的行走方案,即当汽车进入高速公路后,只要设定相应的出口,汽车就可以在此过程中,自动驾驶,并且自动完成超车,让车的动作,保持合理的车距,及实时报告路面状况。








