














基本信息
- 项目名称:
- 嵌入式多模态人机交互智能轮椅
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 为了帮助老年人和残疾人提高自身的生活自理能力和工作能力,使他们更好地融入社会,并针对经济性、安全性和交互流畅性等智能轮椅的市场推广瓶颈,本作品在嵌入式系统(SPCE061A单片机)的基础上,实现了具有手动控制、语音控制、语音交互、超声波自主避障和视觉自主导航功能的多模态人机交互智能轮椅。同时,通过将手动控制、超声波避障和语音播报技术融合到其它模态当中,使得智能轮椅人机交互性更强,运行更加安全稳定。并且相对较低的成本与分模块定制功能的理念使得作品更容易实现产业化。
- 详细介绍:
- (1)手动控制模态 在该模态下,用户可以通过手柄来控制轮椅的运动。由于轮椅在其它模态的运行过程中,手动控制具有最高的优先级,所以在任何情况下,用户都能在第一时间通过手动控制来干预轮椅的运动。 (2)语音控制模态 对于智能轮椅的控制,语音控制是一种自然、便捷的控制方式,能够适用于大多数的用户。在语音识别技术的基础上,用户可以通过直接“对话”来控制轮椅的运动。 如果轮椅在运行方向上遇到障碍物,智能轮椅会“说”该方向有障碍物并停止,然后再提示用户进行决策。用户亦可通过语音指令,对模态进行选择和切换。 (3)超声波自主避障模态 对于老年人和残障人士,在使用轮椅的过程中最需重视的是安全问题,所以轮椅在运行过程中能够安全地避开周围的障碍物以及低洼地段是非常重要的保护措施。 通过在轮椅上安装8组超声波传感器,轮椅在各个模态的运行过程中能够实时地检测周围的障碍物和低洼地段并及时避开,并通过语音播报的形式将信息反馈给用户。在某些特殊场合(如公园、走廊等),用户还可以实现“散步”运行。 (4)视觉自主导航模态 经过调研,很多用户在某些场合(如:家庭、医院、机场)使用轮椅时,往往需要频繁地在固定的路线间来回移动。因此,可以事先在这些路线上铺设好标识线,轮椅通过自动跟踪标识线能够完成到指定地点的移动,并且轮椅在跟踪标识线的过程中会实时检测运行方向上是否有障碍物,当到达指定地点时,还会播报提示音。省去了人为的操控,从而为用户提供方便。
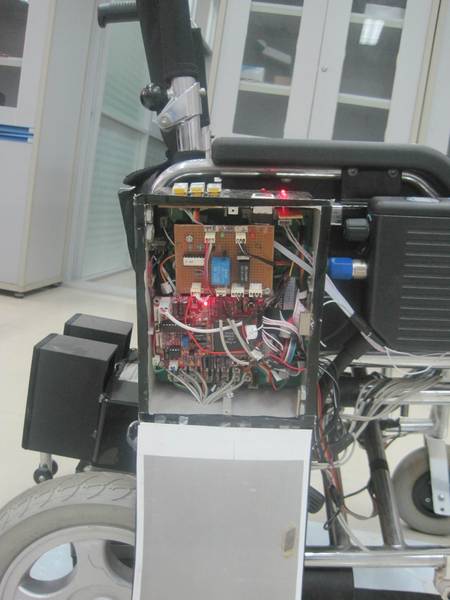
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的:为了给老年人和残障人士提供性能优越的代步工具,希望设计出一款简单易用、安全可靠、性价比高的智能轮椅。本作品设计理念——让智能轮椅不再是少数人的奢侈品! 基本思路:据调研,经济性、安全性和交互流畅性是制约智能轮椅推广的主要因素,而我们设计的作品要较好地解决上述问题。 人机接口:语音交互——用户可以通过“对话”控制轮椅,轮椅亦可将运行与环境状况报告给用户,手柄控制——通过手柄控制运行,并可在任何情况干预轮椅运动; 视觉导航:在一些环境或场合按指定路线导航运行; 超声波自主避障:在特定场合可以自主避障随机“散步”; 安全保护:轮椅通过实时检测周围环境,避开障碍物及低洼地段,实现安全保护。 创新点:在16位单片机基础上,实现了手动控制、语音控制、语音交互、自主避障运行和视觉导航功能,并在各个模态中实现了安全保护和语音播报功能。同时轮椅轻便性好、运行流畅可靠,功能上可根据用户需求分模块定制。 特色:成本低——本作品在原有电动轮椅上增加的自动控制器和所有传感器的单件研制成本为630元;易于产业化——基于单片机的控制器解决了基于PC机的控制器所存在的成本高、功耗大等问题,这向智能轮椅产业化迈进了一大步。 技术关键:智能轮椅涉及人机接口技术、移动机器人技术和多传感器信息融合技术。基于单片机系统智能轮椅的技术难点在于单片机资源和运行速度有限,必须采用高效算法。 技术指标:载重:110kg;一次充电续航:20km;最大速度:6km/h;越障高度:40mm;爬坡能力:15°
科学性、先进性
- 虽然国外已研制出智能化程度较高的轮椅,但这些智能轮椅基本上采用通用计算机作为控制器,体积大、结构复杂、成本高[1]。 我国目前共有四项智能轮椅发明专利。本作品和国内专利轮椅相比,最突出的优势体现在控制器成本和轮椅功能两个方面。 1)成本低 国内现有智能轮椅均采用DSP微处理器或者是PC机作为主控制器,而本作品在实现以下功能的前提下,采用16位单片机作为主控制器,降低了成本。 2)功能强 国内现有的智能轮椅(专利号: 200710173079.8)是在PC机的基础上实现语音控制和语音交互功能;智能轮椅(专利号:200610118866.8)是基于PC机和DSP微处理器实现视觉自主导航功能。而本作品在基于SPCE061A单片机有限的资源下,实现了上述所有功能。并且通过多模态间的融合使得轮椅的运行更加安全稳定可靠。 参考文献: [1] 廖晓辉,沈大中,王东署. 智能轮椅的研究现状与关键技术分析[J]. 制造业自动化,2008(04):1-6.
获奖情况及鉴定结果
- 本作品于2009年5月24日获第十一届“挑战杯”中国大学生课外科技作品竞赛江西赛区决赛特等奖。
作品所处阶段
- 中试阶段
技术转让方式
- 洽谈
作品可展示的形式
- 图片、视频、实物、现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:用户坐稳后,打开控制器电源,然后根据需要选择相应的控制模态即可。 技术特点和优势:采用语音识别、超声波避障、视觉导航、多传感器信息融合四种技术,实现了智能轮椅的多功能性及安全可靠性。 本作品优势在于成本低、功能强、运行稳定可靠、易于产业化。 适应范围:本作品可以方便地应用于普通家庭、医院、康复中心、机场、疗养院、商场、博物馆等场所。 市场分析和经济效益预测:随着社会老龄化进程的加快以及由于各种自然灾害、疾病和工伤事故等原因造成的下肢残障人口的增加,如何为老年人和残疾人提供性能优越的代步工具已成为整个社会重点关注的问题。初步估计,目前全球范围内的电动轮椅年需求量超过百万台。本作品是通过在普通电动轮椅上安装自动控制器和传感器实现的,且自动控制器和所有传感器的单件研制成本仅为630元,而在市场上,功能上相近的智能轮椅,售价均在几万到几十万不等,因此,我们完全有理由相信,我们的智能轮椅与电动轮椅拥有相同甚至更为广阔的市场前景。
同类课题研究水平概述
- 国外智能轮椅研究现状:自1986年英国开始研制第一辆智能轮椅以来,许多国家投入较多资金研究智能轮椅,如美国麻省理工学院Wheelesley项目、德国不莱梅大学开发的智能轮椅Rolland和FRIEND,西班牙Malaga大学开发的智能轮椅SENA等等。下面重点介绍几款典型的智能轮椅。希腊Foundation for Research & Technology Hellas开发了已经商业化的智能轮椅MWYRA,其由笔记本电脑控制,用户可以通过操纵杆直接控制或通过与轮椅串接的电脑间接控制,另外该轮椅还实现了自主避障和视觉导航功能。西班牙Malaga大学开发的智能轮椅SENA,基于PC机实现了除MWYRA所具有的功能外,还拥有语音控制功能。韩国高级科技研究所KAIST开发的智能轮椅,将PC机作为上位机,实现了轮椅的自主运动功能,另外为了方便不能使用操纵杆的用户,用户还可以通过液晶触摸屏来控制轮椅的运动。德国不莱梅大学开发的智能轮椅Rolland,其可以通过手柄控制,也能把用户语言(英语和德语)转化成XML形式进行分析,但其语音识别方面还存在一些问题,而同样由其开发的另外一款智能轮椅FRIEND则基于PC机实现了语音识别功能。日本国家康复中心开发了针对物理残疾者使用的智能轮椅,该轮椅通过安装视觉传感器实现了避障功能,同时使用者还可以通过手势来控制轮椅运动方向,但结构较复杂,成本较高。 国内智能轮椅研究现状:中国开展智能轮椅的研究较晚,但也根据自己的技术优势和特点,开发出了有特色的智能轮椅平台。包括中国科学院自动化研究所的一种嵌入式智能轮椅控制系统及方法(专利号:200510054510.8),该轮椅采用DSP微处理器作为主控制器,在手动控制中融入避障功能;上海交通大学的智能轮椅(专利号:200610118866.8)采用计算机、DSP微处理器和声纳控制器作为主控制器,实现了目标跟踪、避障和防跌功能。在国家“863”计划的支持下,中科院自动化所正在研制一种具有更多功能的智能轮椅。该智能轮椅可以利用自身的视觉系统在房间内进行“自主导航”,自己移动到使用者指定的位置而不需要使用者自己对轮椅进行直接控制。 综上所述,目前国内外智能轮椅共同的特点在于,它们基本上都是采用通用计算机(笔记本电脑或嵌入式工控机)作为上位机,产品的成本高、功耗大、续航能力差。








