














基本信息
- 项目名称:
- 机器人手腕力觉感知系统
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。
- 详细介绍:
- 机器人手腕力觉感知系统是机器人在执行与环境接触任务时必不可少的单元,它可实时检测机器人末端的受力情况,使得机器人具有力觉感知能力,以便机器人更好的执行与环境接触的任务,广泛应用于机器人精密装配、轮廓跟踪、磨削和去毛刺、抛光和擦洗等与环境接触的场合。机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。其核心技术是腕力传感器的结构设计。它采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。机器人手腕力觉感知系统的信号采集、数据处理软件采用LabVIEW软件开发,可对机器人末端接触力实时检测和显示。实验结果表明该系统具有较高的测量精度,将其加在传统的机器人本体上能够使机器人具有高精度的力觉感知能力从而完成各种精密作业,是提高机器人档次的理想途径,可以满足现代工业生产对机器人技术提出的诸多要求。本作品对于我国工业生产领域的发展和实现机器人自动化、智能化、实用化等方面具有一定的科学意义和应用价值,具有很广阔的市场前景和经济效益。
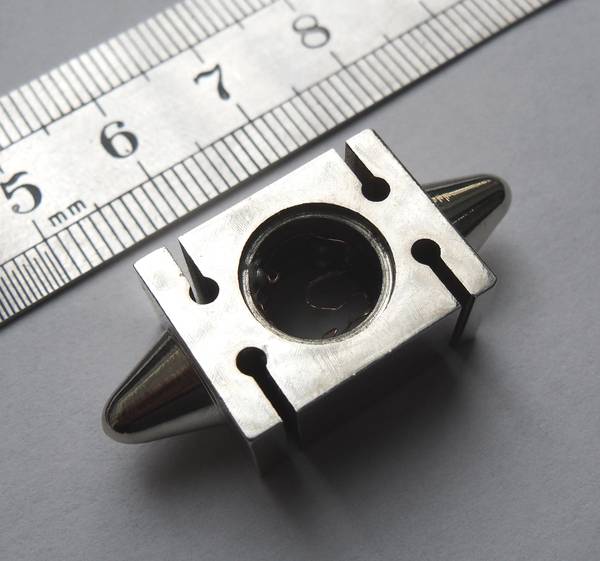
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 机器人位置控制技术已日趋完善,然而由于外部环境和机器人本体的非理想化,单纯位置控制方式下的机器人在从事某些工作时将会产生很大的环境接触力,以至于损坏工件或机械手本身,致使任务无法正常进行。为此,我们研发了一种机器人手腕力觉感知系统,使机器人能够感知外部环境的接触力。 本作品的研究主要集中在其核心单元腕力传感器的结构设计和信号采集、数据处理软件的开发上。腕力传感器采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体,具有明显的创新性。信号采集及力信息显示软件采用LabVIEW软件开发。实验得到了该力觉感知系统精度达到1.4%,能够满足机器人的控制要求。
科学性、先进性
- 本作品中腕力传感器的敏感元件设计中采用球窝锥头式球面副替代传统球面副,并对其整体预紧,使得传感器在测量过程中结构更加稳定;分支只承受压力,避免了过零带来的迟滞现象;检测分支分布在测力平台的上下两侧,提高了系统的整体刚度,并使传感器能够承受更大的颠覆力矩。该作品能够使机器人具有高精度的力觉感知能力,对机器人自动化、智能化、实用化具有重要的意义。
获奖情况及鉴定结果
- 作品于2011.01.16完成装配测试,实验结果表明该机器人力觉感知系统具有较好的测试性能,各项技术指标均达到要求。
作品所处阶段
- 实验室阶段
技术转让方式
- 专利权转让
作品可展示的形式
- 图片、图纸
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该作品的技术特点和优势在于其核心单元腕力传感器采用专利型结构,该传感器具有结构稳定、刚度大、精度高等优点;信号采集、数据处理软件采用LabVIEW软件开发,采集信号通过软件处理更加提高了传感器的抗干扰能力。力觉感知系统可对外界未知环境进行高精度的检测,使机器人能够完成复杂的操作任务。该作品可应用于工业机器人轴孔装配、轮廓跟踪、自动磨削等场合,具有很广阔的市场前景和经济效益。
同类课题研究水平概述
- 随着机器人在各个领域应用的日益广泛,许多场合要求机器人具有接触力的感知和控制能力,例如在机器人的精密装配、轮廓跟踪、去毛刺和磨削等操作过程中,要求保持其手腕末端与环境接触。所以机器人完成这些作业任务,必须具备感知外界环境接触力以及基于力反馈控制的能力。因此,研制精度高、实时性好的力觉感知系统对实现机器人自动化和智能化方面都具有重要的意义。 国内外的专家和相关公司纷纷开展了这方面的研究工作。比如ABB公司研制的机器人通过安装在腕部的六维力传感器实现了复杂装配以及轮廓跟踪等任务。日本FANUC公司研制的6轴平行控制型机器人通过力传感器的反馈作用可柔性抓取洗面奶。日本新能源与产业技术综合开发机构(NEDO)开发的多轴机器人,具有可拣选线缆等柔性物体并将其顶端的接头插入基板的功能。两台6轴机器人组合使用了可高速识别柔性物体的三维传感器,以及可准确识别接头及螺钉插入状态的力传感器等。机器人力觉感知系统研究的核心技术是腕力传感器的结构设计。并联结构力传感器以其刚度大、结构稳定、承载能力高、无误差积累、精度高、逆解求解容易而独具特色,如Kang等研究并研制了基于传统Stewart结构的六维力传感器。国内高峰等人采用弹性铰链来替代球面副为Stewart结构六维力传感器的小型化奠定了基础。贾振元等研制了并联式六维大力传感器。 并联结构的六维力传感器是一种装配结构形式,其特点是传感器由各个测量支路通过传统的球面副与上下平台联接而成,并且在理论上每个测量支路上的测力构件只承受沿杆件轴线方向的拉力/压力(在不考虑各球面副摩擦力矩的情况下),从而可实现无应力耦合的六维力测量。但由于这种传感器采用传统结构的球面副作为联接副,存在以下主要问题:(1)采用传统式球面副结构,传感器结构较为复杂,不易实现小型化;(2)传统球面副容易产生间隙,使得传感器受力过零性差,即当传感器所承受的外力方向改变时,线性度不好,容易产生迟滞现象等;(3)12个球面副需要分别调整和预紧,调整工作量大,并且各预紧力很难一致。这类六维力传感器要想取得动刚度、解耦性、测量精度等综合性能良好的结构并应用到生物力学测量中是比较困难的。因此,本研究小组在腕力传感器结构和信号采集、数据处理软件以及力控制策略方面进行了相关的设计和实验研究,对于我国机器人自动化、智能化的发展和应用具有重要意义。








