














基本信息
- 项目名称:
- 基于谐振驱动原理的微型移动机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。
- 详细介绍:
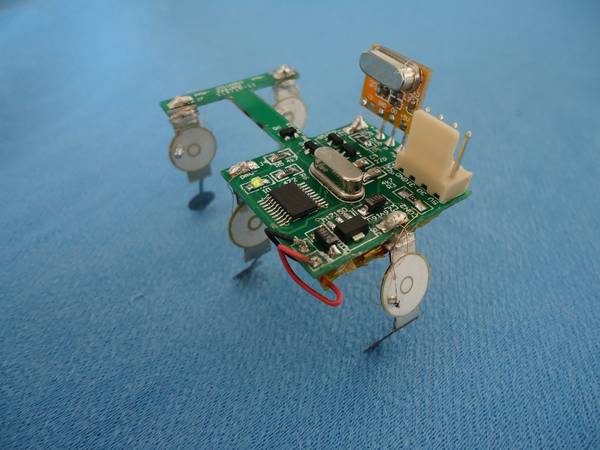
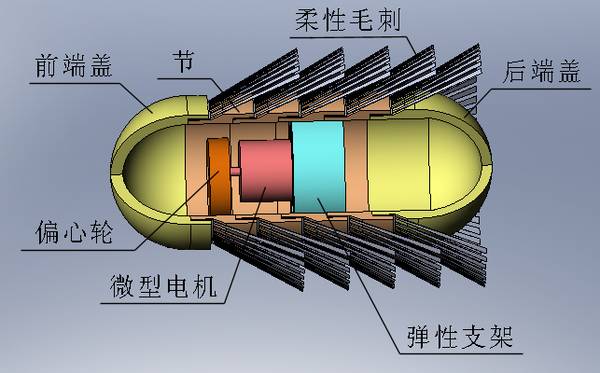
- 本项目设计了一类基于谐振驱动原理的微型移动机器人,可以作为通用移动平台搭载作业装置或微型传感器,单机或多机组网作业。项目的具体研究思路是针对现有微小型机器人在研究中遇到的问题提出了一种新型谐振式驱动方式,利用Ansys建立柔性足子结构的有限元模型,进行模态分析,设计双压电膜的结构尺寸,进行微型机器人能源模块、主控模块、驱动模块、无线通信模块的系统集成与小型化设计,将整个移动机构简化为一个构件,实现致动、传动、执行元件的一体化,使其结构简单,易于小型化和批量制造。基于该研究思想研制地面、管道微型移动机器人样机。研制的微型机器人具有控制灵活、速度快、功耗低、便于批量制造等优点,可用于检测有毒气体、放射性物质,工业中细小管道的情况,或作为侦察设施用于城市巷战中的情报搜集等。如制做的管道机器人样机尺寸20mm*11mm*12mm、可适应的管径最小为15mm、质量9.039g、最大速度接近30mm/s。它可携带检测传感器广泛应用于石油、化工以及核电站中细小管道的内窥检测,生产、安装过程中的管内外质量检测,管道使用过程中焊缝情况、表面腐蚀、裂缝破损等故障诊断,以及对埋地旧管道的检查等。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 一、设计、发明的目的和基本思路 传统运动副结构复杂,当特征尺度减小时还面临传动效率急剧下降的问题。因此移动机构成了制约微小型机器人运动性能,并限制其实际应用的瓶颈。为解决这一现实问题,提出利用谐振原理驱动机器人运动,用柔性机构取代传统的运动副,以达到简化机构、提高运动效率的目的。通过理论分析与实验研究,研制了微小型谐振式移动机器人样机。并面向核工业管道检测,研制了微型谐振式管道检测机器人。 二、创新点 1、提出利用谐振原理驱动微小型移动机器人,并研制了利用柔性机构代替传统运动副的新型谐振式微小型机器人移动机构; 2、研制了谐振式微小型机器无缆化驱动控制器; 3、研制了面向核工业蒸汽发生器管道检测的谐振式微小型管道内窥机器人。 三、技术关键和主要技术指标 1、进行了谐振式微小型移动机器人致动、传动、执行一体化移动机构和动力学参数的设计与优化; 2、研究了基于幅频特性的谐振式微小型移动机器人运动控制方法; 3、开发了低功耗、微型化嵌入式控制器。 地面微型机器人机构尺寸为 49mm*28mm*24mm ,负荷重量为9.212 g。由7.4v,140mAh的锂电池供电可持续工作约53min,设定激励频率可控制机器人前、后、左、右运动。微型管道内窥机器人长20mm,最大移动速度30mm/s,自重9.039g,功耗较低。在6v电压下,该微型机器人可在最小内径为15mm的管道内移动,速度约为24mm/s,携带CMOS微型摄像头,分辨率为15万像素。
科学性、先进性
- 本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。制作的机器人以及加工技术同国内外同类产品相比亮点在于驱动方式新颖、控制灵活、运动速度快、功耗低,且结构简单,易于批量制造,在制作工艺和成本方面具有显著优势。此外,可根据不同的工作环境要求对机器人尺寸结构进行调整,从而极大提高了微型机器人的综合性能,增加了新型机器人的科技含量,拓展了机器人的应用领域,因此技术的产业化具有广阔的应用前景和经济效益,可显著提高我国微机器人在狭小环境监测、微系统组装、细胞操作等领域的使用价值。 《基于谐振设计的微型管道机器人》查新报告表明:外表面覆有一层具有非对称摩擦特性的微尺度纤毛状机构的谐振驱动管道机器人未见于国内外公开文献报道。(见附件一) 本产品现已申报1项国家发明专利(专利申请号:201110086875.4)。
获奖情况及鉴定结果
- 1、一种微型管道移动机器人,申请国家发明专利,专利号:201110086875.4,第一发明人为项目主持人。(见附件二) 2、基于单片机无线控制的新型谐振式微型移动机器人,已被《2010年IEEE光学仪器与测量》录用,并于2010年11月刊登,第一作者为项目主持人。(见附件三) 3、中广核检测技术有限公司、苏州博实机器人技术有限公司对本项目研制的地面微型移动机器人和微型管道内窥检测机器人进行测试,评价较高。项目作品曾被扬子晚报、苏州日报、科学时报、江苏科技报等多家媒体报道。(见附件四、五、六、七) 4、我校第十一届“挑战杯”科迪石化大学生课外学术科技作品竞赛特等奖。(见附件八) 5、我校第十二批大学生课外学术科研基金资助项目,重大项目,项目编号KY2010002Z。(见附件九)
作品所处阶段
- 项目现处于中试阶段。针对项目的应用正与苏州博实机器人有限公司,苏州热工院等单位开展交流合作。
技术转让方式
- 可一次性技术转让或合作
作品可展示的形式
- 1、实物、产品 2、模型 3、图纸 4、现场演示 5、图片 6、录像 7、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本项目结构简单,易于批量制造,可以有效降低企业应用成本;同时体积小,可工作于人类难以进入的狭小空间以及对人类健康产生危害的特殊环境。可作为通用移动平台搭载作业装置或微型传感器,单机或多机组网作业。 发电、化工、制冷等行业的热交换器 , 特别是核电站的热交换器存在着直径大小不等的细小管道 , 长期使用后的腐蚀或机械损伤会引起裂缝,酿成严重的事故。本项目中的管道机器人可在工业上各类细小管道中应用,项目研制的微型管道机器人可作为这类检查机器人的雏形,在机器人上装载微型CMOS摄像头,可实现管内质量检测,故障诊断等功能,确保工业生产的安全性,其综合性能优异,经企业试用,反映良好。本产品成本低,发展空间很大,可替代同类进口产品,市场开发前景广阔,推广应用后将产生良好的社会和经济效益。此外,微型机器人具有体积小、隐蔽性好、机动性好、生存能力强、成本低等特点,在城市和恶劣环境下(如核、生、化战场等)的局部战争和信息战争中也具有重要作用。
同类课题研究水平概述
- 近些年随着微电子技术、精密微加工及一体化制造技术、微传感技术,新材料、特别是 MEMS ( 微机电系统)技术的发展,在机器人家族中又诞生了一个新的分支——微小型机器人。 欧盟 ESPRIT 项目资助德国等欧盟国家的共八所大学与飞利浦等两家公司的科研机构联合开发了 Miniman 系列微小型机器人系统,该系统现已成功实现了微小齿轮的装配。哈尔滨工业大学研制的宏/微驱动精密作业微小型机器人系统于2006年完成了 200μ m轴孔装配。精密测量、狭小环境检测、细胞操作、介入医疗等都是微小型机器人“大展拳脚”的舞台。上海大学龚振邦教授研制的尺蠖式微型管道机器人、哈尔滨工业大学刘品宽等人研制的惯性冲击式微型管道机器人都可以用于狭小工业管道的检测。 研究发现微小型机器人存在以下问题: (1) 一般的移动机构,结构较复杂,加工、制造成本高,小型化困难; (2) 受尺度响应影响,移动机构小型化后运动性能下降,润滑等问题难以解决; (3) 传统移动机构存在传动副,难以实现很高的运动分辨力; (4) 一般的微型机器人能源利用率低,能耗高,无法长时间进行无缆化作业。 随着机器人的特征尺度由宏观向介观甚至微观的延伸,尺度效应引发的能源供给与消耗之间的矛盾变得越发难以解决。一方面,电池所能携带的能源与特征尺寸成立方关系,当机器人的尺寸减小一个数量级时,电池所能提供的能源将减小到原来的千分之一。而另一方面,随着尺寸的减小,与体积相关的惯性力、重力等的影响降低,而与表面积相关的摩擦力、粘滞力、表面张力等的影响增加,传动副的润滑问题难以解决,摩擦加剧,机构的运动效率急剧降低。受两方面因素综合作用的影响,目前毫米级的微小型机器人大都无法通过自身携带的能源进行长时间的工作,而普遍采用了拖缆供电,如欧盟的miniman系列机器人、MIT的nanowalker等机器人系统。这极大的限制了微小型机器人的实际应用。 尺度效应对微型机器人的机构、驱动、设计与控制等方面提出了新挑战,寻求高功率自重比的驱动部件、高效率的微型移动机构成为了目前微型机器人研究领域的重要研究内容。本项目针对微机器人研究中面临的以上问题提出一种利用谐振原理驱动的新型微机器人。该机器人通过机构的振动实现运动,将整个移动机构简化为一个构件,使得结构简单易于小型化和批量制造。








