














基本信息
- 项目名称:
- 海上风电安装船升降系统的研制
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 目前,海上风电设备安装基本上是由自升式或浮式起重平台(船)两类工程船舶完成的。本作品研究的对象是自航自升式风电安装船的升降系统,其功能由机械传动装置及其相应的控制单元实现。 机械传动装置采用超大模数的齿轮齿条传动机构,并配备液压驱动系统及工作位置锁紧机构。升降过程的控制与监控及平衡状态的调节等,通过研发基于PROFIBUS的分布式控制系统予以实现。本作品是一个缩小比例的实物模型。
- 详细介绍:
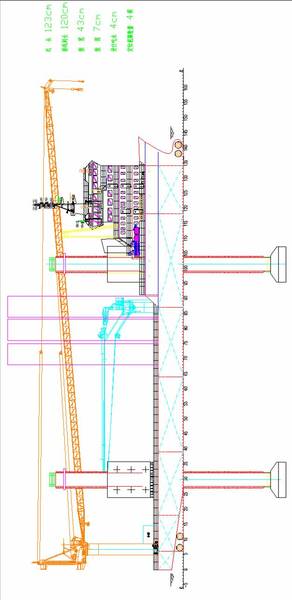
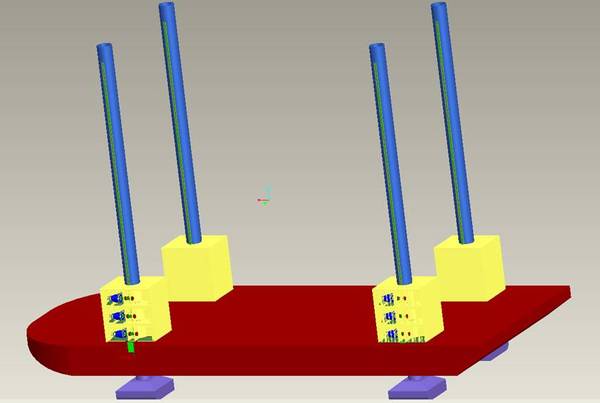
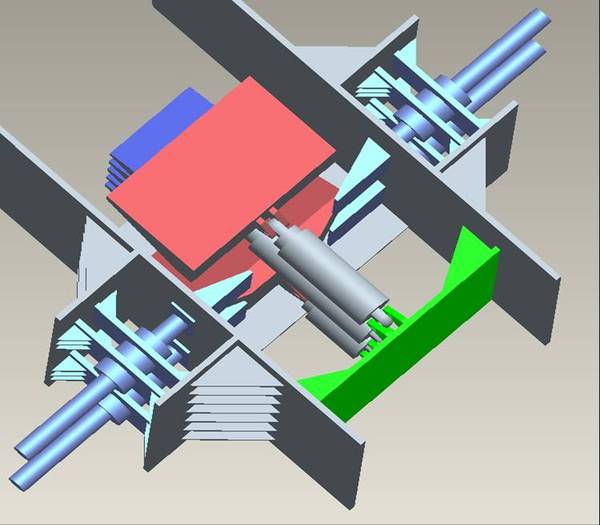
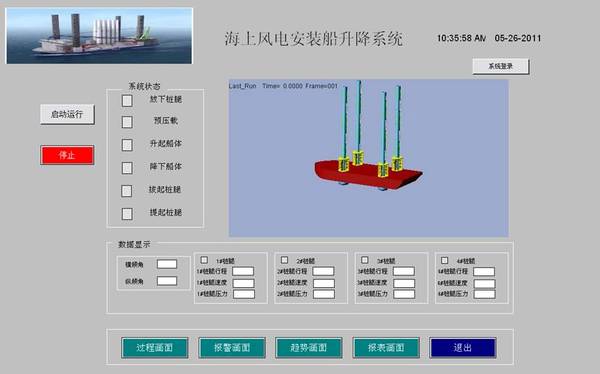
- 海上风机安装基本都是由自升式起重平台和浮式起重船两类工程船舶完成的,船舶可以具备自航能力,也可以是非自航。采用何种方式安装风机,取决于水深、起重能力和船舶的可用性。本作品(升降系统),选择近海(30m水深左右)海况,根据4台5MW风机的安装容量设计的船型,并配备一台能力为400t的起重吊机,设计4个桩腿(具有桩靴)及其升降系统。在工作现场,桩腿插入海底支撑并固定船舶,通过液压系统驱动齿轮齿条升降装置可以调整船舶升离水面一定距离,形成不受波浪影响的稳定平台,并由起重吊机完成对风机的吊装。本作品所实现的功能由一组机械传动装置及其相应的控制单元完成。 机械传动装置由超大模数的齿轮齿条传动机构、位置锁紧机构组成。齿条沿桩腿筒体铺设,而与齿条相啮合的小齿轮安装在齿轮架上,并由液压马达经减速齿轮驱动。该装置能使桩腿和船体作相对的上下运动,并保持二者的相对位置。当船体漂浮于水面时,驱动齿轮可使桩腿升降,而当桩腿支承于海底时,驱动齿轮则使船体升降。位置锁紧机构采用一段齿条与升降齿条啮合来实现,并在每条桩腿上对称放置一对锁紧机构,该机构的功能是当安装船升或降到指定位置时,锁紧机构抱死桩腿,使安装船与桩腿保持相对位置。同时,锁紧机构具有机械自锁功能,在电力系统或液压系统发生故障的异常情况下,保证升降系统的安全。本装置采用超大模数的齿轮齿条传动机构,具有承载能力大、连续升降平稳、升降速度快、操作灵活的特点。 针对升降系统的功能需求及布置特点,船体及桩腿的升降过程控制、船体平衡状态的调节、升降系统工作过程的监控等,通过研发基于PROFIBUS的分布式控制系统予以实现。该分布式控制系统由主控制器和四个桩腿控制器组成。主控制器由上位机、S7-300可编程控制器(主站PLC)等组成。上位机上装有西门子组态软件WinCC并且安装有通讯卡。考虑到处理信号比较多,为保证通讯的实时性,以 S7-200可编程控制器(从站PLC)作为桩腿控制器。利用PROFIBUS现场总线连接主站PLC和从站PLC,实现主站和从站的通信和数据传输。控制系统具有单独控制和协同控制的特点,即在主控制器出现故障的情况下,桩腿控制器也可以对其相应的桩腿进行作业。并且,系统具有可扩展性强,环境适应性好,能在设备高度分散的情况下进行控制的优点。在船体上升或下降的自动操纵过程中,为实现船体准确快速的调平,提出提出了一种船体平衡控制方案。采用双轴倾角传感器测量船体的倾斜状况,并将数值反馈到主站PLC,若超过精度范围时,通过PID算法控制调节各个桩腿速度实现船体的自动平衡。该平衡控制方案的协调性好,稳定性高,响应速度快,有较好的抗干扰能力和良好的控制精度。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品的目标及基本思路: 升降系统是风电安装船的关键部分,其可靠性是桩腿和平台顺利实现升降的保证。设计并制作一艘新型的风电安装船的模型,其升降系统采用先进的齿轮齿条传动系统,并配备一套安全可靠的锁紧机构。升降控制系统采用基于PROFIBUS的分布式控制模式,并通过WinCC组态软件开发监控系统,实现船体及桩腿的升降过程控制、船体平衡状态的调节、升降系统工作过程的监控等功能。 创新点: 1.开发了一套超大模数的齿轮齿条传动机构,并配备新型工作位置锁紧机构,满足升降系统的工作要求,并能通过锁紧机构在电力系统或液压系统发生故障的异常情况下,保证升降系统的安全。该机构具有承载能力强、升降速度快、稳定性好等优点。 2. 针对升降系统的功能需求及布置特点,设计了基于PROFIBUS的分布式控制系统。控制系统具有单独控制和协同控制的特点,且系统可扩展性强,环境适应性好。 3. 对于船体升降过程中出现倾斜状况,并考虑到桩腿负荷很大的情况下,提出了一种船体平衡控制方案。该平衡控制方案的协调性好,有较好的抗干扰能力和良好的控制精度,能够快速稳定的实现自动平衡要求。 关键技术: 1.平衡控制方案的设计。 2.PID控制的实现。 3.动态实时监控系统的开发。 4.机械机构的新型设计。 主要技术指标: 1.速度平稳0.6m/min。 2.模型的水平姿态精度控制在±3度以内。 3.在电力系统或液压系统失效的情况下,锁紧机构仍能保证系统的安全。
科学性、先进性
- 现有的自升式海上风电船的升降系统为缆索式、销孔式,存在升降速度慢,维护任务重的缺点。升降控制系统一般采用集中控制,控制系统非常脆弱,一旦服务器由于断电、系统故障或其他因素引发故障,与其相连的整个生产过程就会全面瘫痪。另外,位于不同地理位置上的设备或工作环境发生改变时,集中控制无法做出快速响应。 与现有的系统相比,本系统优点有: 1.超大模数的齿轮齿条传动机构,具有承载能力强、升降速度快、效率高、稳定性好、安全性高及连续的传动能力等优点。 2. 新型工作位置锁紧机构,可以在电力系统或液压系统发生故障的异常情况下,保证升降系统的安全。 3. 基于PROFIBUS的分布式控制系统,具有可扩展性强,环境适应性好,能在设备高度分散的情况下进行控制的优点,可实现单独控制和协同控制。 4. 船体平衡控制方案的协调性好,稳定性高,响应速度快,有较好的抗干扰能力和良好的控制精度。
获奖情况及鉴定结果
- 作品在2011年6月3日,教育部科技查新工作站L19进行科技查新。 查新结果为:在所检国内公开发表的中文文献范围内,未见有与本项目“海上风电安装船升降系统的研制”查新点完全相同的公开文献报道。
作品所处阶段
- 实验室阶段
技术转让方式
- 无。
作品可展示的形式
- 模型、图纸、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 作品的技术特点及优势: 该升降系统采用网络化控制,实现海上风电安装船的自动化控制,并通过运行在上位机的监控系统实现对风电安装船的全过程监控,具有很高的可靠性和安全性的特点,结构简单,加工制造成本低,完全能够满足船体平台的升降要求。 作品的适应范围和市场经济效益: 通过对海上风电安装船的升降系统研发,掌握自主研发的自升技术,可以突破海上风机的安装技术瓶颈,有利于降低海上风电成本,有利于绿色能源的开发和利用,经济效益和社会效益明显。且国内建造的自升式海洋平台及其控制系统几乎全部由国外厂商供货。因此,自升式海上风电安装船升降系统的研究,对于我国自行设计和建造自升式海上风电安装船具有特别重要的意义。其研究成果将对自升式海洋升降机构的国产化提供强大的技术支持。且该技术对于其他结构形式的自升式平台同样适用,具有广阔的市场应用前景。
同类课题研究水平概述
- 国外研究情况: 世界上现有的专用安装船为数甚少。A2SEA公司的M/V SEA POWER 与M/V SEA ENERGY均采用滑轮系统,而滑轮系统的维护任务重;五月花能源公司设计的“Mayflower Resolution”(五月花号),升降系统是液压销孔式的。销孔式系统存在运动不连续,速度慢,不能定比传动的不足。 对于升降控制系统,六十年代以来,国外各公司陆续推出了采用网络技术的海洋平台控制系统,如荷兰和美国公司的未来型系统。七十年代荷兰公司推出了专用于海洋平台控制的计算机分散式控制系统,完成起升系统控制和系统监测等全部自动化任务。升降系统是海洋平台控制系统的一个重要环节。目前,国外海洋平台己经广泛采用了PLC控制其升降系统,又开始应用PLC组成局域网来实现这一任务。 国内研究情况: 我国海上风电刚刚起步。2009年3月20日在上海东海大桥首批3台3MW风机整体吊装安装成功。执行吊装任务的是“四航奋进号”,这是由我国自行设计建造的、国内最大的双臂架全液压固定式浮吊起重船,非自升式结构。目前国内自升式的风电安装船有七O八研究所设计的“海洋38”号、南通中远船务设计建造的“MPI ADVENTURE”(探险号),其升降系统分别为缆索式、液压销孔式。而升降速度对风电船的工作效率有较大影响,现在的齿轮齿条传动是自升式升降系统的主流方向之一。 当前国内海洋平台的控制系统,一般采用集中控制方式。而升降装置布置在桩腿与平台交接的四个角点,各节点的距离相隔比较远,传输的数据量比较大并且各节点需要进行联合控制和单独控制。且集中控制存在反应速度慢,由于长距离传输信号衰减等缺点,集中控制这种方式难以满足控制要求,这相对于国外的先进控制系统有很大的差距。








