














基本信息
- 项目名称:
- 基于挖掘机姿态实时显示技术的挖掘辅助系统
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 当前挖掘机操作方式只依靠驾驶员在驾驶舱内单一视角观察铲斗动臂等姿态,有诸多局限。本系统通过对挖掘机的姿态进行检测,并将其实时显示,便于驾驶员在更宏观的高度观察、操控挖掘机。
- 详细介绍:
- 挖掘机实时姿态显示是挖掘机器人实现作业状态遥控的重要组成部分,可减轻挖掘机驾驶员的劳动强度,为驾驶员的精确挖掘提供指导,同时该系统还实现了挖掘机的遥控作业,以使驾驶员在安全的位置操控挖掘机,避免置身于危险环境中遭受人身伤害。解决特殊危险场合的作业问题,是现代工程机械的一个研究方向。 本系统通过对安装在挖掘机铲斗、斗杆、动臂的主要铰接点的角度传感器,给位于驾驶员面前的上位机提供角度参数,使之绘出当前挖掘机的姿态图像。驾驶员通过上位机输入预定挖掘坐标,系统为驾驶员的操作提供图像参考。当挖掘机铲斗到达预期目标,系统予以图像与声音提示,让挖掘工作在程序计算的精确辅助下更好更高效的完成。
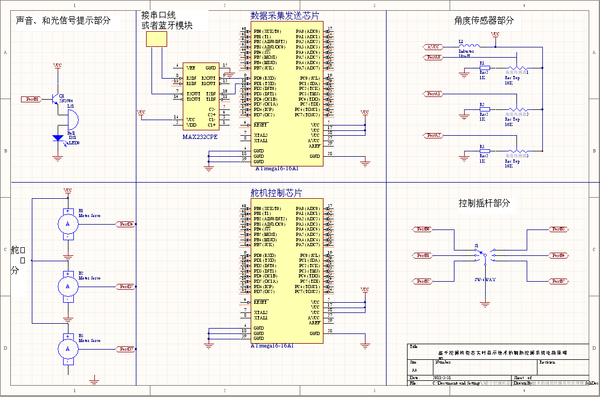
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 掘机在进行挖掘作业时往往需要精确控制挖掘机向下挖掘的深度。当前挖掘机操作方式需要专门的测量人员通过间断取点测量的方法来指导挖掘机的工作,导致工作效率较低,而且存在安全隐患。但是目前专门针对于“精确掘”的“挖掘辅助系统”国内却较少提出。本系统通过对挖掘机的姿态进行检测,并将其铲斗末端坐标等实时显示,便于驾驶员观察、操控挖掘机,能提高挖掘机的工作效率。挖掘机为铺设管路、挖掘管路复杂的市区环境提供了更安全、更精确、更高效的电子程序指导。作品设计基本思路:挖掘机驾驶员在驾驶室的上位机输入目标深度,下位机通过角度传感器采集挖掘机每个关节点的相对角度,车载微处理器将角度量转化为数字量,电脑对接收到的数据进行计算及显示,当挖掘机的挖掘深度达到预计深度时就向司机发出声音提示。创新点:国内外对于挖掘机器人的研究较多但是专门针对“挖掘辅助系统”的研究并不多见,本作品采用成熟的角度传感器技术结合单片机针对“挖掘辅助系统”提出了一种切实可行的方案。技术关键:角度量的采集、单片机与电脑的接口技术、电脑对数据的实时处理和显示。技术指标:角度传感器精度:0.293度通信波特率:9600bps上位机实时显示帧速:5帧/秒
科学性、先进性
- 当前多数挖掘机的操作都是依靠驾驶员经验来判断挖掘机的挖深,挖掘机在对较窄沟渠进行挖掘作业时往往需要精确控制挖掘机向下挖掘的深度。该作品的实质技术特点和先进性体现在:在实施精确挖掘时由以前需要多人配合才能完成,变为可以自动、精确地测量挖掘深度,不再依靠专门的测量人员;由以前的间断的测量变为实时的测量,而且可以在铲斗末端到达指定位置时给予司机提示。提高了工作效率和挖掘机的自动化程度,并且该系统具有可靠性较高成本低的特点,便于推广与应用。
获奖情况及鉴定结果
- 2010年太原科技大学大学生创新性实验项目
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 模型现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 用数据线将上位机与下位机连接,接通下位机电源,打开上位机软件,上位机便可实时显示挖掘机的姿态,在目标位置处输入预计的深度坐标后单击确定,系统便可以在挖掘机末端到达指定位置时通过下位机给予声音和显示提示,以实现挖掘辅助的目的。适用范围:适用安装于新型挖掘机和对已有挖掘机进行改装。
同类课题研究水平概述
- 目前国内外对于挖掘机器人的研究仍处于实验室阶段。美国 Carnegie Mellon 大学已开发出基于图像识别的挖掘机器人,但是由于挖掘机作业环境的复杂性,目前的图像识别技术并不可能完全取代人类完成挖掘机的施工作业。澳大利亚机器人技术中心(ACFR)的自动挖掘研究提出“力/阻抗控制”,但只是提供了改善铲斗运动的稳定性的方法,操作上仍需要驾驶员凭借经验把握挖掘位置。浙江大学高峰在他的博士后学位论文提出“制造出了‘一台性能优良的试验型挖掘机器人’”该机器人能实现“任务规划”、“节能控制”、“半自动控制”、“工况监测”、“无线遥控”等功能。浙江大学机械设计研究所在2000年开发出挖掘机器人,但是并未针对挖掘机驾驶员的辅助操作做出专门设计。








