基本信息
- 项目名称:
- 基于ARM消防机器人的设计
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
- 本项目以Linux为平台ARM为核心,加以测距传感器、红外蔽障、循迹传感器,摄像头以实现图像识别,配合一定的机械设备完成从发现到报警、响应,最终完成灭火操作。
- 详细介绍:
- 该项目利用ARM可移植操作系统及并行处理事件的优势,对时间要求严格的场合,并行完成多个任务,以节约时间和成本。最大限度降低财产损失,保证生命财产安全。 利用摄像头和传感器识别火源或火种方位的图像,在火源或火种方位确定后立即报警、接近火源,既保证机器安全又可将火势较小的火源扑灭,实现火源距离的准确测量及实现小面积火源的扑救作业。
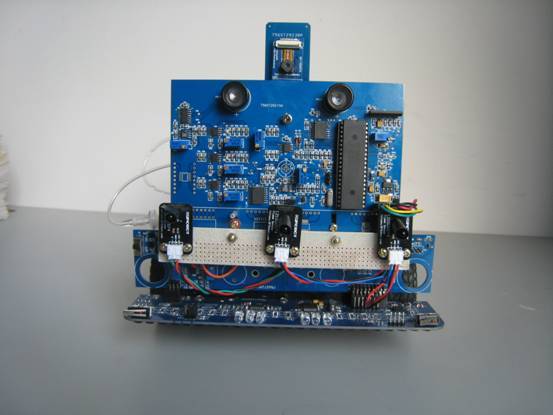
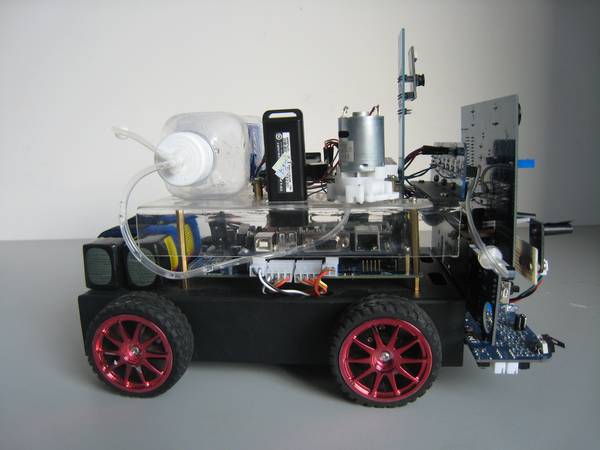
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 火灾事故的频发,严重危害人民群众生命财产安全。通常的消防设施是在火险发生时用来灭火的,并不能做到监测火情,因此,火灾发生初期有效的消防操作是至关重要的。据观察火险从发生到可造成巨大灾害的一段时间内,前三分之二的阶段不具有巨大破坏力,且火势较小,只需进行简单的消防操作就可完全扑灭火源,但此段时间不易被发现,且往往被忽视,该项目的主要任务是完成这三分之二阶段内从探测、报警到灭火的操作,在火势较小时将其扑灭,降低损失。 本项目以Linux为开发平台,ARM2440为核心,通过测距传感器、红外蔽障、循迹传感器、CMOS摄像头,实现探测火源、图像识别,并配合一定的机械设备完成从发现到响应、报警,最终完成灭火操作。 技术指标:核心板使用S3C2440A处理器,驱动模块和循迹模块采用ARM7处理器,无线通信模块,探测模块,摄像头模块,驱动程序,消防机器人采用linux 2.6版操作系统。
科学性、先进性
- 拟利用摄像头和传感器确定火源或火种方位的图像识别部分难度较大;在火源或火种方位确定之后如何接近火源,既保证机器安全又把火势较小火源扑灭的算法;以及实现准确靠近火源的测量和在机器车上安装何种设备以实现小面积火的扑救作业。 国内、外都有大型的消防机器人,可拖动水管进行消防作业,但它们只是停留在作为救火机器的水平,并不具备警戒、火险预警的功能,由于体积大不能在室内运用;没有对应的保护室内物品、避免发生火险的消防设施。所以该项目补充了以上不足,具有以下优点:1、加入预警环节,不放过任何可疑情况2、发现即报警,第一时间通知火险情况3、加入操作系统,实现并行执行程序以达到最大程度的节约时间4、对火险地点拍照,提高火情照片和相关依据5、加入消防措施,提前作消防操作
获奖情况及鉴定结果
- 无。
作品所处阶段
- 调试改进阶段。
技术转让方式
- 未曾转让。
作品可展示的形式
- 实物、产品;现场演示。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 一、使用说明: 1、登陆目标机:在命令提示符下输入:telnet 192.168.1.50(目标机IP)回车 出现登陆界面: Qiushi login: 2、输入:root 回车 无密码 3、运行程序:输入# ./car_control_0_6 192.168.1.101(pc的IP),回车 备注:初次运行时,传感器需初始化,即明确白和黑的差别二、技术特点和优势 1、多种探测方式并实现疑似情况预警:利用火焰传感器探测火源,温度传感器采样周围温度并比较是否异常,提供预警依据。 2、linux操作系统实现并行执行程序以最大程度节约时间,完成探测,拍照,报警,靠近火源,同步执行灭火操作,消灭火灾在萌芽状态。三、应用范围 :用于对火种较敏感场合,在安全时期处于侦察状态,不断扫描周围环境,探测温度等物理量,一旦发现火苗或疑似火源,停止探测并接近可疑点,拍照传回服务器并立即发出报警,提供判断;若是,循迹到火源地采集照片并扑灭火苗。挽回不可估量的经济损失。
同类课题研究水平概述
- 机器人技术作为20世纪人类最伟大的发明之一,自60年代初问世以来,经过40年的发展已取得长足进步。现在世界上有约75万台工业机器人战斗在各条战线上。仿人形机器人、农业机器人、服务机器人、水下机器人、医疗机器人、军用机器人、娱乐机器人等各种用途的特种机器人纷纷面世,而且正以飞快的速度向实用化迈进。 随着各国对国家安全、社会治安等公共事业的高度重视,以防爆、防恐、消防灭火、排险救援等为特征的危险作业移动机器人的需求日益凸现。危险作业机器人成为继工业机器人之后,发展最快,应用最广,受到极大重视的一类机器人。目前仍有一些危险作业机器人关键技术问题亟待解决。我国的机器人专家从应用环境出发,将机器人分为两大类,即工业机器人和特种机器人。所谓工业机器人就是面向工业领域的多关节、多自由度机器人。而特种机器人则是除工业机器人之外的、用于非制造业并服务于人类的各种机器人,包括:服务机器人、水下机器人、娱乐机器人、军用机器人、农业机器人等。在特种机器人中,有些分支发展很快,有独立成体系的趋势,如服务机器人、水下机器人、军用机器人、微型机器人等。 从2002年开始“亚洲广播电视联盟”在亚洲及太平洋地区举办了一年一度的“亚太地区大学生机器人大赛”,中央电视台也举行了一年一度的“全国大学生机器人电视大赛”。由于机器人的制作涉及到了电子、通讯、机械、自动控制、材料、能源等学科的综合知识和实际应用,因此我们在老师的指导下,利用现有技术和设备,力求创新,经过多次研究与实践,才自己动手设计制作出了这个技术含量高,构思新颖巧妙,又有一定的实用性、应用范围广阔的智能监测、排爆机器人。