














基本信息
- 项目名称:
- 果园移动式多功能梯的设计
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- “果园移动式多功能梯的设计”是针对于我国大片果树的修剪、采摘和套袋等工作量大,劳动强度高,分析果树修剪、采摘和套袋的特殊性,设计的一种用于水果采摘、修剪和套袋的梯子,可实现采摘修剪套袋时,人不用下梯而移动梯子,且结构工艺简单,方便实用,以最低的费用减轻劳动强度,增加农民收入。
- 详细介绍:
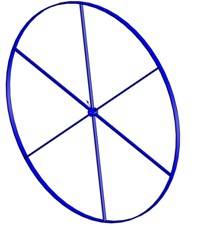
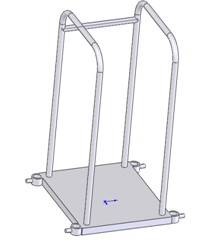
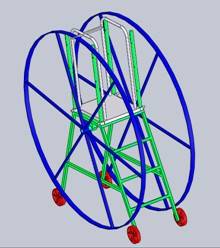
- 开始工作时,由梯上的人用手扳动行走大轮前后移动,梯脚小轮只起支撑作用。当果树高度适中时,移动扶手落至底部,采摘者可根据果树的高度坐在座位上或站在梯架上采摘。当果树过高时,拉动移动扶手到适宜高度,四周插上固定销,便可实现高果树的采摘作业。 果园移动式多功能梯的设计组成:1移动扶手;2固定扶手;3工作平台;4行走大轮;5中间轴;6支撑小轮;7支撑装置;8梯架
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:减轻农民劳动强度,增加农业效益和农民收入; 基本思路:利用两个行走大轮及四个支撑小轮使人能够自主移动工作平台; 创新点:实现了人不用下梯而移动梯子、高或矮的果树采摘和修剪工作; 技术关键:移动装置及修剪采摘梯的升降装置的设计; 技术指标:大轮的直径D=2410mm,轮宽为30mm; 小轮的直径D=200mm,宽度为21mm; 轮毂直径为30mm; 作业平台为600×600mm; 扶手外框为1145×600mm,内框为1560×538mm;中间轴的长度为940mm,小轮轴长度为150.5mm; 大轮与轴之间选用型号为61907的轴承,轴承利用轮毂与挡油板定位。中间轴两头上有M30的螺母。大轮与轴之间有轴间,保证大轮的横向定位。
科学性、先进性
- 使用者通过控制工作平台左右两侧的行走大轮,使该梯按照使用者要求进行平稳移动,在使用过程中也可根据实际情况的需要利用滑动插销调整内扶手与外扶手间的相对位置关系,达到工作平台的升降; 实现了人不用下梯并按照个人要求平稳移动梯子完成对高或矮的果树果实进行采摘、套袋和果枝修剪等工作;同时该梯还具有结构简单,方便实用,价格便宜,且适用面广的特点; 该梯适用于果园的果树管理作业(果实套袋、采摘,果枝的修剪等); 由于我区及全国大片果树的修剪、采摘和套袋等工作量大,劳动强度高,通过分析果树修剪、采摘和套袋的特殊性,针对性的设计了“果园移动式多功能梯”,以最低的费用减轻劳动强度,增加农民收入,与此同时,“果园移动式多功能梯”造价便宜,实用性强,日常维护和保管均比较容易,因此该作品推广后可获得良好的市场效益、经济效益及社会效益。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物图片、设计图纸、三维视图
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- “果园移动式多功能梯的设计”的设计填补了该领域在国内实际应用的一项空白,虽然该设计的结构较为简单,但其立意具有一定的创新性,且做到了紧贴实际,达到了设计由实际出发,为实践生产所用的要求。同时该设计的适用范围较为广泛,推广后经济效益及社会效益较高。 在我国水果的修剪和采摘大多还是用人工来完成的,针对于我国大片果树的修剪和采摘工作量大,劳动强度高,借鉴他人的研究成果,分析果树采摘和修剪的特殊性,设计一种用于水果采摘和修剪的梯子。 该梯适用于果园的果树管理作业(果实套袋、采摘,果枝的修剪等); 由于我区及全国大片果树的修剪、采摘和套袋等工作量大,劳动强度高,通过分析果树修剪、采摘和套袋的特殊性,针对性的设计了“果园移动式多功能梯”,以最低的费用减轻劳动强度,增加农民收入,与此同时,“果园移动式多功能梯”造价便宜,实用性强,日常维护和保管均比较容易,因此该作品推广后可获得良好的市场效益、经济效益及社会效益。
同类课题研究水平概述
- 国外研究现状: 在日本、美国等发达国家,农业人口较少,随着农业生产的规模化、多样化、精确化,劳动力不足的现象越来越明显。许多作业项目均为劳动力密集型的工作,劳动力问题很难解决。但同时由于果园作物的娇嫩性和复杂性更多的此类研究还处于实验室的试验阶段,没有得到实际应用。究其原因:一方面因为的成本过高,另一方面是此类设备的研究没有达到农业生产的智能需要,而智能水平的提高与成本的降低又相互制约。因此,本次设计的“果园移动式多功能梯”还未在国外出现。 国内研究现状: 在20世纪90年代,很多院校、研究所也都在进行农业机器人和智能农业机械相关的研究,虽然相对于发达国家起步较晚,但是发展很快。截止到今天机器人智能技术的发展还不够完善,很多任务无法用机器人单独完成。所以,在我国水果的修剪和采摘大多还是用人工来完成的,因此有很多农业工程领域的专家把工作重心转向为如何尽可能的减轻农民劳动强度,增加农业效益和农民收入。因此一种半人工半机械式的农机具设计思路便诞生了。“果园移动式多功能梯”的设计便顺应了这种设计思路,并且较好的结合了实际,突出了应用。 综上所述:具有较高的市场应用前景,能较好的提高劳动的生产效率,降低劳动的强度,提高劳动质量。








