














基本信息
- 项目名称:
- 快速反应潜水艇机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 快速反应潜水艇机器人是一种新型的水下机器人。它的设计颠覆了传统的潜水艇依靠浮力和重力实现上浮下潜的方式。巧妙地将直升机的空气动力学原理与潜水艇的驱动系统相结合,使潜水艇机器人具备快速反应的能力。
- 详细介绍:
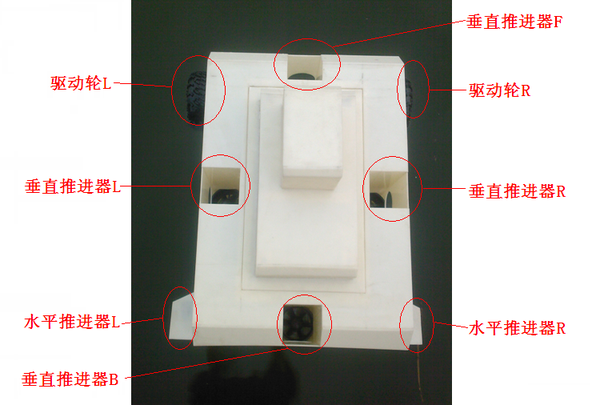
- 快速反应潜水艇机器人将直升机的空气动力学原理与潜水艇的驱动系统相结合,通过调节4个垂直方向的推进器的转速,来控制机器人的上浮和下潜,以及机器人在水中的姿势。并利用角度传感器以实现平衡控制的目的。 (1)动力结构,用4个潜水电机作为垂直推进器和平衡器,通过调节垂直推进器的转速及转向,来控制机器人的上浮和下潜,以及机器人在水中的姿势;两个潜水电机作为前进和转向推进器,以上6个潜水电机共同完成流体动力结构的设计。两个潜水电机作为陆地行走驱动器,实现机器人两栖作业的功能。 (2)控制系统,采用ADuC7026作为智能控制主控CPU,采用角度传感器作为平衡控制传感器,并辅助摄像和超声波等技术,实现对机器人的自主控制。 (3)上位机,实现PC机对快速反应潜水艇机器人的远程控制。 以上综合完成整个作品的设计。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的 (1)快速反应潜水艇机器人主要作为新型的水下环境立体监测系统,应用于水下环境的监测、调查、探测、拍摄等领域。 (2)该作品是集流体动力学、智能控制与平衡技术和机器人制造技术为一体的高科技项目。巧妙地将直升机的空气动力学原理与潜水艇的驱动系统相结合,使机器人在水下能够快速反应。 基本思路 快速反应潜水艇机器人通过调节4个垂直方向的推进器的转速,来控制机器人的上浮和下潜,以及机器人在水中的姿势。并配合平衡控制传感器达到四轴平衡。 (1)用4个潜水电机作为垂直推进器,两个潜水电机作为前进和转向推进器,共6个潜水电机共同完成流体动力结构的设计;用两个潜水电机作为陆地行走驱动器,实现机器人两栖作业的功能。 (2)采用ADuC7026作为智能控制主控CPU,采用陀螺定位作为平衡控制传感器,并辅助摄像和超声波等技术,实现对机器人的自主控制。 (3)设计VB上位机界面,实现PC机对快速反应潜水艇机器人的有缆或无缆远程控制。 创新点 快速反应潜水艇机器人巧妙地将直升机的空气动力学原理与潜水艇的驱动系统相结合,使潜水艇机器人具备快速反应的能力。 技术关键 流体动力学方面,需要多个潜水电机产生巨大推力共同完成; 平衡控制方面,潜水艇机器人需要采用三维平衡控制技术,而且需要快速反应; 智能控制技术,采用ARM7智能控制,技术比较成熟; 摄像技术,数据处理量比较大,采用无线传输技术将数据传送主控计算机。 主要技术指标 系统安全稳定运行并且快速反应。
科学性、先进性
- 潜水艇机器人与传统式潜水艇采用完全不同的结构设计和控制技术,具有创新性。该潜水艇机器人在多个潜水电机的推力作用下可完成上浮下潜前进等动作,反应速度快。
获奖情况及鉴定结果
- 2011年4月14日本作品获得我校“挑战杯”组委会专家委员的一致认可,并获得代表我校参加省“挑战杯”决赛的资格。
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- (1)实物、产品 (2)现场演示 (3)图片 (4)录像 (5)样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该作品是集流体动力学、智能控制与平衡技术和机器人制造技术为一体的高科技项目。它巧妙地将直升机的空气动力学原理与潜水艇的驱动系统相结合,能够快速反应。在水下环境的监测、调查、探测、拍摄等领域,以及水下机器人竞赛的项目中具有较好的推广前景。
同类课题研究水平概述
- 近年来,国内外的新型水下机器人如雨后春笋。其中,动力结构的创新主要有水下滑翔机器人和泳动型水下机器人两种。 1、水下滑翔机器人 水下滑翔机器人是一种新型的水下机器人。水下滑翔机器人没有外部驱动装置,而是依靠自身的浮力驱动,沿锯齿型航迹航行。通过浮力调节系统来调整载体的排水量,使水下滑翔机器人交替出现正浮力与负浮力状态;依靠内部的执行机构改变载体的质量分布,以改变机器人的运动姿势。 2、泳动型水下机器人(Swimming Robot) 这种机器人大致可以分为两类:微型泳动机器人和仿生机器人。 其中,微型泳动机器人在工业、航天和医疗等领域都具有广阔的应用前景。1994年日本科学家Fukuda等人研制出了一种以压电体为致动器的双鳍型微机器人。这种机器人的推动力来自共振效应,机器人通过双鳍的运动在水中产生前后泳动。 2002年广东工业大学自动化研究所研制了一种能够在水中或者粘性流动体中运动的鱼形微机器人。这种鱼形微机器人具有柔韧性好、低电压驱动、响应性能良好等特点,在工业、医疗领域具有广阔应用前景。 而仿生机器人是应用仿生学原理,模拟生物的身体结构和运动形式来设计的水下泳动型机器人。1994年美国麻省理工学院成功研制了世界上第一条真正意义上的机械鱼——仿生金枪鱼。 在国内,哈尔滨工程大学的仿生水下机器人“仿生-1”号,其外形和游动方式仿制蓝鳍金枪鱼,机器人采用月牙形尾鳍,通过尾鳍的摆动提供前进的动力和转动的力矩,胸鳍则控制机器人的泳动深度。“仿生-1”号在水池试验中的最大摆动频率为1.3Hz,通过调整尾鳍的摆动,“仿生-1”号具有纵向速度和艏向控制能力。中科院沈阳自动化研究所制作了两关节的仿生机器鱼模型。北京航空航天大学机器人研究所根据“波动推进理论”研制了一条仿生机器鳗鱼及仿生机器海豚。2004年12月,北航机器人研究所和中国科学院自动化研究所又成功地研制出“SPC-II”型仿生机器鱼,机器鱼的壳体仿照鲨鱼的外形,主要制造材料为玻璃钢和纤维板。“SPC-II”型仿生机器鱼长1.23m,总重4kg,最大下潜深度为5m,最高航速可达1.5m/s,能够在水下连续工作2~3小时。这条机器人曾出色地辅助考古专家对福建郑成功古战舰遗址进行水下探测。








