














基本信息
- 项目名称:
- 智能图书管理机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 学校图书馆每天都有上万本图书借出和归还,这对图书馆的管理人员来说无疑是一个很大的负担,他们每天都要先对图书进行整理分类,然后再把图书送到相应的书架上,全手工操作,不仅工作量大,而且效率较低。针对这种现状, 我们设计了“智能图书管理机器人”来代替人力,让机器人来对图书进行识别分类,再把分类好的图书送到相应的书架上,以达到减少人力、降低工作强度、提高工作效率的目的。
- 详细介绍:
- 本作品可以根据情况进行两种模式设置,第一种模式为纯粹的“识别分类”模式,第二种模式为“识别分类+运送”模式。因此,可适用于工作要求基本相同的场所,例如,档案馆、超市、工厂等。机器人由于工作效率高、出错率低、可以代替人工劳动等特点,所以能为适用场所提高工作效率、节省成本。因此,具有很好的推广前景。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
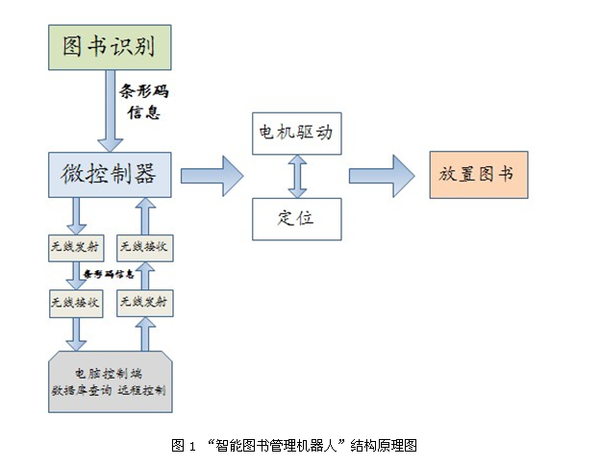
- 1、作品设计、发明的目的 学校图书馆每天都有上万本图书借出和归还,这对图书馆的管理人员来说无疑是一个很大的负担,他们每天都要先对图书进行整理分类,然后再把图书送到相应的书架上,全手工操作,不仅工作量大,而且效率较低。针对这种现状, 我们设计了“智能图书管理机器人”来代替人力,让机器人来对图书进行识别分类,再把分类好的图书送到相应的书架上,以达到减少人力、降低工作强度、提高工作效率的目的。 2、基本思路 首先由图书识别器对图书进行扫描,将获得到的图书信息和计算机数据库匹配,计算机将位置信息返回给“机器人”,然后“机器人”根据位置信息通过定位系统自动找到相应的书架,最后“机器人”把书放到相应的书架上。 3、作品的创新点 1)实现智能化管理,在一定程度上取代人力,节约成本,提高效率;2)采用仿生学超声波定位技术,实现精确定位。 4、作品的技术关键 1) 图书识别技术;2) 数据库信息匹配;3) 仿生学超声波技术,实现室内精确定位;4) 上位机管理与无线通信。 5、作品的技术指标 1) 图书识别器通信接口:RS232 2) 超声波定位模块电压、工作频率:DC5V、40KHZ 3) 无线通讯距离、波特率:<300 m、9600 bit/s 4) 整套系统工作电压:DC5V和DC12V 5) 模数转换精度:10位 6) 仿生学超声波定位系统精度:3cm
科学性、先进性
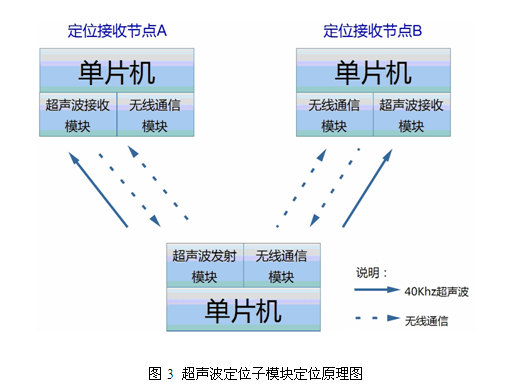
- 作品的科学性先进性 1) 采用图像识别技术,自动识别条形码,并直接与微控器串口通信,避免了USB接口硬件和软件的复杂性,提高了工作效率与识别精度,并借助SQL2008强大的数据库管理功能,结合Microsoft visual C++ 6.0对ODBC(Open DataBase Connectivity)的支持,在VC6.0环境下编写上位机实现了对大量图书信息更高效更快捷的管理。其技术性进步是将机械、电子、计算机技术、无线通信技术相结合实现了对图书的智能化管理。 2) 运用超声波与电磁无线通信相结合,实现了室内精确定位,分析如下:定位发射节点在接收到定位命令后启动无线发射模块给两个定位接收节点发送启动计时信号同时启动超声波发射模块发送超声波信号,定位接收节点在接收到启动定时信号时开始计时,当超声波信号到达时停止计时,再由定位接收节点通过无线模块返回计时信息给定位发射节点。
获奖情况及鉴定结果
- 2010年11月本项目得到我校“机器人设计和智能控制创新实验基地”的重点扶持;2011年4月14日本作品获得我校“挑战杯”组委会专家委员的一致认可,并获得代表我校参加省“挑战杯”决赛的资格。
作品所处阶段
- 实验室阶段
技术转让方式
- 知识产权转让或技术授权方式
作品可展示的形式
- 实物、现场演示、图片、录像、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1、作品的技术特点和优势 1)根据条形码信息在现有的图书数据库中插入位置代码键值,优势在于因不用再重新建立数据库而节省人力和成本;2)采用仿生学超声波技术,优势在于相比传统定位更加精确。 2、作品的适应范围和推广前景 本作品可以根据情况进行两种模式设置,第一种模式为纯粹的“识别分类”模式,第二种模式为“识别分类+运送”模式。因此,可适用于工作要求基本相同的场所,例如,档案馆、超市、工厂等。机器人由于工作效率高、出错率低、可以代替人工劳动等特点,所以能为适用场所提高工作效率、节省成本。因此,具有很好的推广前景。
同类课题研究水平概述
- 在国外,西班牙卡斯捷罗大学机器人智能实验室研制成一种移动式机器人图书馆员实验样品。研究小组负责人恩格尔•波比 利 教授设想,图书馆是引入机器人最理想的地方,可以展示出机器人的效率,这个名为 UJI 联机机器人是一个具有 3 个轮子的操作器,装备有摄像机和传感器,还拥有带有 7 个关节和 2 个手指的“手”,用手指可以抓东西。头部识别系统在听到读者关于书籍的询问要求之后,会将读者的要求发送到数据库,再从那里获得关于所需书籍所处最近位置的信息。然后 UJI 联机机器人会行驶到书架旁边,同时利用红外线和激光系统导航,对 4 米 范围内的全部书籍进行扫描,随后找到读者需要的书籍。目前,机器人图书馆员实验不仅在西班牙,而且还在日本和美国进行。研制者希望,再经过几年时间能让机器人图书馆员进入大型图书馆或藏书库。 在国内,北京发明协会的课题组成员研究出一款机器人,用于乱架图书的整理。简化图书馆工作人员的管理,便于人们自由借阅,此款机器人利用循线技术和全向轮控制行走路线,利用条形码阅读器配合升降架读取数据,判定出乱架图书位置,并利用程序设定出图书馆管理员最佳整理图书路线。 虽然以上两款机器人也都是用于图书馆,但和“智能图书管理机器人”相比,实现的功能不同,用到的技术也不相同。因此,相比之下,“智能图书管理机器人”在对图书进行识别分类和摆放图书这方面更具优势。








