基本信息
- 项目名称:
- 基于双目立体全方位视觉的交通事故现场测绘仪
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作B类
- 简介:
- 本项目研制的基于双目立体全方位视觉传感器的交通事故现场测绘系统,可以实时测量出交通事故现场任意两点间的距离和方位信息,并依据测量结果和简单的指令信息自动绘制出交通事故现场图,同时通过拍摄一组交通事故现场序列图,即使在交通事故撤除以后,也可以利用拍摄的序列图对交通事故现场进行校验或补充勘测,避免了错测漏测,增强了勘测结果作为证据的科学性和充分性,提高了交警部门的执法公信力。
- 详细介绍:
- 目前,国内外大部分交通警察在交通事故现场勘测中仍大量使用手工作业方式,手工作业方式对交通事故现场测量主要是靠人眼判断、手摸、皮尺量、手工绘图等传统方法,该方法主要存在速度慢、漏测、漏画、错测,现场破坏后无法再次做校验测量等诸多方面的缺陷。 本项目研究一种基于双目立体全方位视觉传感器的交通事故现场测绘系统,该系统分测量装置和系统软件两个部分,利用该系统可以实时测量出交通事故现场任意两点间的距离和方位信息,并自动绘制出交通事故现场图,极大提高交通事故的勘查效率。而且通过拍摄一组交通事故现场序列图,即使在交通事故撤除以后,也可以利用拍摄的序列图进行校验或补充勘查,避免了错测漏测,增强了勘查结果作为证据的科学性和充分性,提高了交警部门的执法公信力。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计、发明的目的 为解决交通事故现场勘测和绘图效率和准确性、科学性问题而设计,利用计算机视觉测量视觉现场的测量点间的距离,根据测量结果自动绘制交通事故现场图。 基本思路、创新点、技术关键和技术指标: 1.水平视觉范围360°,垂直视觉范围到达120°。 2.双目视觉重叠区域为立体视觉范围,立体视觉范围为360°*120°。 3.通过选择上下ODVS中的同一物点的像点,测量方位角和距离,方位角的计算在所有情况下都是百分之百准确的,在0.2米~5米范围内,距离的测量精度较高,测量误差在0~5cm范围内。 4.实时获取双目立体视频图像,并实时进行柱状展开。 5.手动和自动进行极限匹配,极限匹配的精度在一个像素内。 6.能对道路、车辆停放位置、地面痕迹及其其它痕迹等自动测量;在道路测量中包括:道路的地理测量、平交路口的测量、道路宽度的测量;对于不明显的地面痕迹测量及其其它痕迹测量,需要采用具有明显特征的移动标志物来标明痕迹以及痕迹的长度,以便能在全景图像中快速地找到特征点完成痕迹的测量。 7.根据测量结果,自动完成交通事故现场图的绘制,绘制的图形符号(根据《中华人民共和国国家标准道路交通事故现场图形符号》制作,包括道路、机动车、非机动车、人体等类型)位姿与实物在世界坐标系中的位姿应保持一致,角度偏差不超过-2°~2°。 8.整体运行速度满足实时性的要求,能够在交通事故现场实时测量,绘制和打印出交通事故现场记录图、现场比例图、现场断面图、现场立面图和现场分析图。
科学性、先进性
- 1.利用本项目所开发的基于双目立体全方位视觉测量技术进行交通事故现场勘查可以快速疏通现场、便于事后保存和恢复现场资料,进行所需要的量测及绘制,进而为事故责任认定提供一种有效的途径。 2.在组成双目立体传感器的结构上,使得上下ODVS在同一轴线上,任何极限面都保证通过轴线,为快速立体图像匹配提供了良好的基础,能够实现交通事故现场特征点间的自动匹配与测量。 3.在全景视频图像获取、加工、存储、表达上均采用统一的高斯球面坐标,以及以人为中心的观察(Viewer Centered)方法,提出了“中央眼”的类似于生物观察方法;简化了摄像机标定、特征点的匹配过程中的欧氏空间与高斯空间之间多次转化,为实时快速运算提供了技术基础,同时所获得的立体视频图像更具有立体感、沉浸感、同时知觉和融合力,计算景物的空间位置更加方便。
获奖情况及鉴定结果
- 1、2010年全国大学生创新性实验计划项目,项目编号:101033701。 2、2010年12月该项目在浙江工业大学校运河杯竞赛中获特等奖。
作品所处阶段
- 中试阶段
技术转让方式
- 专利转让或技术合作开发
作品可展示的形式
- 实物、产品、模型 、现场演示、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
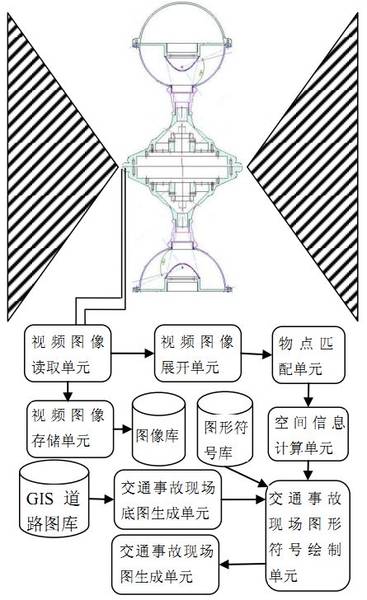
- 使用说明: 在交通警察勘查交通事故现场时,可以使用双目立体全方位视觉传感器放置在交通事故现场中心,实时测距、绘图、出图;或采集一组图像,撤出交通事故现场后勘测、绘图、出图。 具体操作步骤: ①将双目立体全方位视觉传感器放置到交通事故现场中央,并利用装置上的指南针确定上ODVS的零度方位角对准正北方向,连接计算机。 ②利用GPS定位该装置所处的位置信息,在GIS库中搜索出发生交通事故路段的道路图,并将该道路图作为绘制交通事故现场的底图。 ③打开交通事故现场测绘软件,在上ODVS的柱状图上选择测量点后,软件自动匹配下ODVS的测量点,测量出特征点间的距离和角度等数据,并根据在模型库中旋转的模型和对应的测量点在画布上绘制出对应的图形符号,标注测得的数据。 ④在绘图界面中也有对应的模型库,提供了一般绘制交通事故现场图软件的功能。可以根据需要手动添加、修改模型。 ⑤保存采集的上下ODVS全景序列图像,在撤除交通事故现场后能够全景序列图像再次对交通事故做校验性或补充勘测。
同类课题研究水平概述
- 1.基于双目视觉原理解决勘测难题的研究现状 目前,通过拍摄一组二维照片,从中选取需要测量的点,得到其像空间坐标值的测量方法属于一种双目立体视觉测量方法,立体视觉是模仿人类利用双目线索感知距离的方法,实现对三维空间位置信息的感知,在实现上采用三角测量的方法,运用两个摄像机对同一物点从不同位置成像,并进而从视差中计算出距离。但是目前立体视觉的技术运用在交通事故现场测量上还存在着一些缺陷:1)无法达到全方位的实时、高精度地测量感知,特别是交通事故现场的范围比较大,摄像装置的焦距固定,由于一个固定的焦距只能在一定景深范围内清晰拍摄图像,因而限制了测试区域;2)存在着比较繁琐的标定工作,所谓的摄像机标定是为了确定摄像机的位置、属性参数和建立成像模型,以便确定空间坐标系中物体点同它在图像平面上像点之间的对应关系。摄像机标定需要确定摄像机内部几何和光学特性和相对一个世界坐标系的摄像机坐标系的三维位置和方向。在目前的立体视觉技术中摄像机标定必须解决两个问题,一个是单个摄像机参数的标定,另一个是双目摄像机参数的标定;3)三维空间位置信息的检测依赖于图像的立体匹配,立体匹配是指根据对所选特征的计算,建立特征之间的对应关系,将同一个空间物理点在不同图像中的映像点对应起来,要准确地对包含了光照条件、景物几何形状和物理特性、噪声干扰和畸变以及摄像机特性等不利因素的图像进行无歧义的匹配,显然是十分困难的,至今这个问题还没有得到很好的解决。 全方位视觉传感器ODVS (OmniDirectional Vision Sensors) 为实时获取场景的全景图像提供了一种新的解决方案。ODVS的特点是视野广(360度),能把一个半球视野中的信息压缩成一幅图像,一幅图像的信息量更大;获取一个场景图像时,ODVS在场景中的安放位置更加自由;监视环境时ODVS不用瞄准目标;检测和跟踪监视范围内的运动物体时算法更加简单;可以获得场景的实时图像。同时也为构建双目全方位视觉传感器的立体视觉测量系统提供了良好的基础。 2.绘制交通事故现场图的研究 目前利用计算机绘制交通事故现场图已经有了很多成熟的软件应用,本课题不是单纯的利用计算机手动绘制交通事故现场图,而是将双目立体全方位视觉传感器对交通事故现场某些特征点的测量结果作为绘制交通事故现场图元素的参数,自动绘制现场图。真正达到快速自动化的目标。