基本信息
- 项目名称:
- “探路者”号探月车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 数理
- 大类:
- 科技发明制作B类
- 简介:
- “探路者”号探月车是基于现今人类探测月球的现状设计的。“探路者”作为一个需要在月球上移动工作的设备, 它的设计主要由越障能力、样品采集、能源来源和能量耗散等诸多因素来考虑。
- 详细介绍:
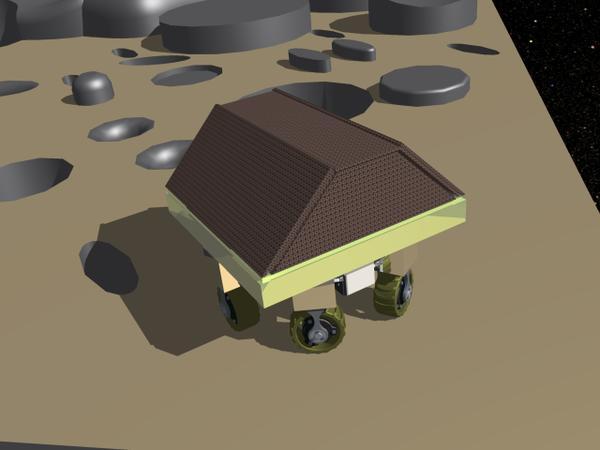
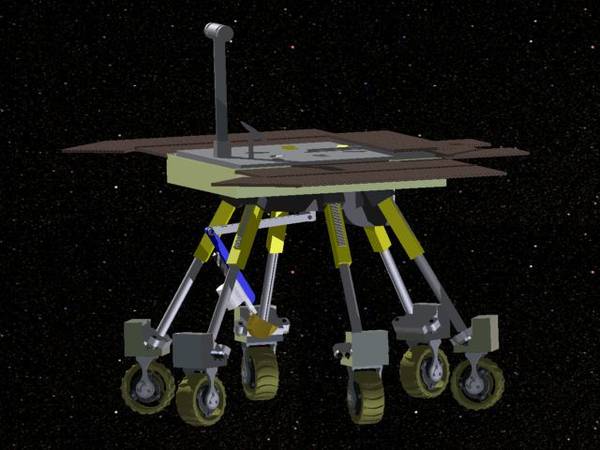
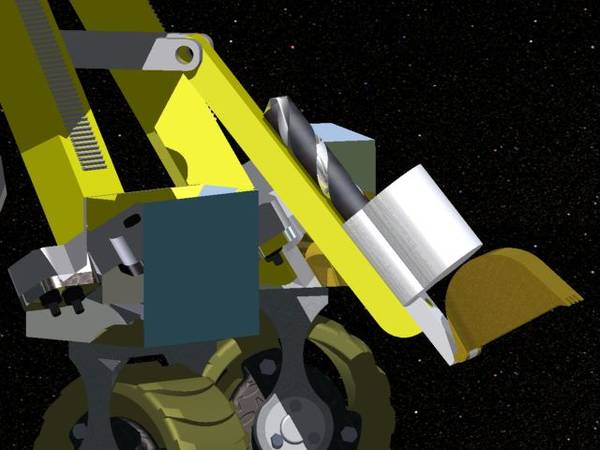
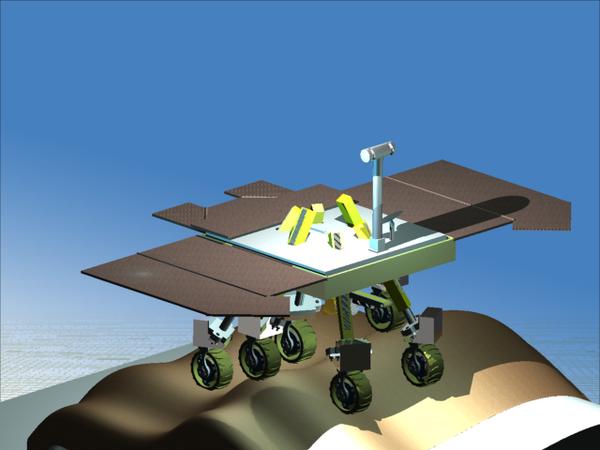
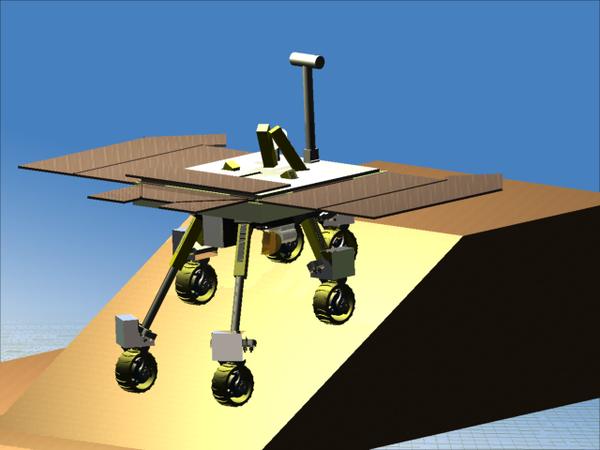
- “探路者”号探月车 1引言 自古以来,人类的活动范围经历了从陆地到海洋,从海洋到天空,从天空到外太空的拓进过程。 借助于二十世纪五十年代逐步成熟起来的航天技术,人类开创了探索外层空间的新时代。经过近半个世纪的迅速发展,人类在航天领域已经取得了巨大成就,其中对月球的探测成果显得尤为丰硕。 众所周知,月球是距离地球最近的自然天体,于是它便理所当然的成为人类探测遥远太空的首选目标。自1969年7月美国“阿波罗11号”飞船首次登月成功后,人类的探月征程全面启动。开展月球探测是进行航天活动的必经之路,对人类的发展具有重要的战略意义。 为此,我国启动了月球探测计划——“嫦娥”工程。虽然人类的探月已取得了较大的成就,但人类进入太空并在太空开展活动的危险性还是不可小觑的。 因此,我们团队设计了“探路者”号探月车,让它代替人类在月球上完成探测任务,这样既可以有效保障人类的安全,降低探测月球的成本,同时还可大大提高人类全面探测月球的效率。 2作品设计基本思路 作为一个在月球上移动工作的设备,“探路者” 号月球车的设计主要从发射时的体积、在月球展开后的体积、在月球上的越障能力、样品采集能力、能量来源和能量耗散等方面考虑。 3部件设计说明 3.1车体数据(单位:mm) 项目 参数 项目 参数 折叠车身 15000 *15000 *12500 视镜距底盘高度 1000 太阳能帆板翼展 2250 *4500 轮距 1100—1800 底盘距地高度 600—1500 车轮直径 300 表1 车体基本数据 3.2机械臂机构 机械臂机构采用了非常精简的设计,在满足取样要求的同时,减少能量的消耗。 前端采样部分使用了一个高强度合金钻头,能够完成深层月壤的采集工作。与采样钻头配合工作的是一个铲斗,其完成样品的收集工作。同时在手臂前段配置了一个摄像头,使对样品的采集工作可以更加的精确。整个采样部分,同样是尽量简化设计,从而提高了机构的可靠性和稳定性。 3.3车轮悬架 “探路者”的设计主要从整车的越障能力来考虑。悬架由六个独立的轮腿构成,呈正六边形分布,在行进过程中保证轮子不都在同一条直线上。当遇到凹洼时,即使在一轮、两轮甚至三轮(正三角分布的三个轮子)悬空的情况下车体仍能继续正常行走。 六个独立的轮腿可以调节长度,增大了悬架的灵活性,可保证底盘距地650㎜——1400㎜之间升降。轮腿的长度调节是相互独立的,通过调节能保证车在起伏不平的地方行走时底盘的水平,最大可以在30°的斜坡上行进而底盘仍保持水平,提高了车的越障能力,也有利于车载设备的保护。每个轮腿与底板呈60°,在轮腿长度改变时轮距也发生变化,当遇到障碍物时,能够通过调节悬架的长度来改变轮距(轮距1100—1800mm)以保证整车的越障性能。轮子转向部分的设计能够使得每个轮子在一个平面内实现360°转动,这样的设计能够让系统通过对每个轮子的分析将轮子调整至最佳转向而不受其它轮子和环境的限制。 3.4太阳能帆板 “探路者”号探月车的太阳能帆板设计综合考虑了发射时的体积、工作的能源提供、月球上温差大等因素,采用了非完全折叠式。在发射时帆板折起呈盒装,减小了帆板的体积,为发射节省了空间、保护其中的仪器;当其在月球上工作时展开,为车的活动提供能量来源。在月球进入夜晚时,小车周围温度会急剧降低,此时帆板将收起到发射时的状态,减小车内热量散失,防止车载贵重仪器在低温下被损坏。 3.5双目视觉系统 “探路者”配备了一套双目视觉系统,承担对周围环境信息的采集与分析工作。双目视镜镜架采用旋转折叠方式,收起时呈直角,减小体积。工作时镜架呈直线。两个摄像头可以调节其俯仰角度,同时还可以随着镜架左右转动,这样的设计可以使该系统观察到小车周围的所有位置。 3.6 通讯设备 “探路者”的通讯设备由信号处理系统和外部天线组成,完成对地球指令的接收和数据反馈。 4技术推广应用价值 “探路者”是为人类探索月球而设计的,可胜任对月球的探测取样任务,同样也可完成对其它太空天体的探测任务。作为一台拥有良好越障、采样能力的可移动设备,它也可在地球执行任务,譬如一些人类难以进入的作业区域和危险区域等。 月球作为离地球最近的天体,是人类探索外太空的首选目标。月球上有着丰富的矿产资源,对世界各国具有强大的诱惑力。未来探测月球的脚步将越来越快,作为一个探测月球的工具,“探路者”无疑将拥有良好的市场和广阔的前景! 5参考文献 [1]胡震宇 袁 勇主编;《月球车》;2005.06 [2]欧阳自远;我国月球探测的总体科学目标与发展战略[期刊论文]-地球科学进展;2004.06 [3]王巍 夏玉华 梁斌;月球漫游车关键技术初探[期刊论文]-机器人;2001.05 [4]赵金才;深空探测总体技术研究现阶段的思考; 2005.08 [5]Berkelman P Design of a Day/Night Lunar Rover 1995
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 一、作品设计的目的: 人类的探月已取得了较大的成就,但人类进入太空并在太空开展活动的危险性还是不可小觑的。 因此,我们团队设计了“探路者”号探月车,让它代替人类在月球上完成探测任务,这样既可以有效保障人类的安全,降低探测月球的成本,同时还可大大提高人类全面探测月球的效率。 二、作品设计的基本思路: “探路者”作为一个需要在月球上移动工作的设备, 它的设计主要由越障能力、样品采集、能源来源和能量耗散等诸多因素来考虑。 一、作品的技术性分析说明: 1.轮腿机构: 轮腿结构采用正六边形排列方式而非平行排列的方式,在行进过程中所有轮子均不在同一条直线上,当遇到凹洼时,即使在一轮、两轮甚至三轮(正三角分布的三个轮子)悬空的情况下车体仍能继续正常行走。 2.轮子转向机构: 轮子转向部分和传统轮子转向设计相比,本作品设计能够使得每个轮子在一个平面内实现360°全方位转动,这样的设计能够让系统通过对每个轮子的分析将轮子调整至最佳转向而不受其它轮子和环境的限制。当轮子磨损或变形后,通过调整仍能保证它具有优良的抓地能力。 3.车轮与车体的连接机构: 车轮与车体的连接机构与其他探月车相比,本作品的设计增大了此机构的灵活性,使轮子能够在距底盘650㎜——1400㎜之间运动,此机构能够保证车体行走时车身的水平。同时,由于悬架与底板呈60°,在悬架运动时轮距也发生变化,当遇到障碍物时,能够通过调节悬架的长度和轮距来保证整车具备较好的越障性。
科学性、先进性
- 一、作品的技术特点及优势: 1、各个轮子独立运动,互不影响。探月车的每个轮子都采用单电机驱动,同时,轮子与悬架的连接部分同样采用独立电机控制,使得各个轮子能够在其所在平面内实现360°全方位转动,互不影响。 2、悬架部分采用主动独立悬架。悬架长度可以调节,通过调节能够改变底盘与轮子的距离,使其在不平整的地面时仍能保持整车水平,最大可以在30°的斜坡上保持车身水平。 3、样品采集机构精简可靠。探月车采样机构借鉴、整合了挖掘机前端铲斗和破碎锤的结构,由一个铲斗和钻头组成,在能完成采样任务前提下,机构具有很高的可靠性和稳定性。 二、作品的适应范围及推广前景的技术性说明: “探路者”是为人类探索月球而设计的,可胜任对月球及其它太空天体的探测任务,也可在地球执行任务。 三、作品的市场分析和经济效益预测: 未来探测月球的脚步将越来越快,作为一个探测月球的工具,“探路者”无疑将拥有良好的市场和广阔的前景!
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 专利转让
作品可展示的形式
- 模型 现场演示 图片 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 一、作品的技术特点及优势: 1、各个轮子独立运动,互不影响。探月车的每个轮子都采用单电机驱动,同时,轮子与悬架的连接部分同样采用独立电机控制,使得各个轮子能够在其所在平面内实现360°全方位转动,互不影响。 2、悬架部分采用主动独立悬架。悬架长度可以调节,通过调节能够改变底盘与轮子的距离,使其在不平整的地面时仍能保持整车水平,最大可以在30°的斜坡上保持车身水平。 3、样品采集机构精简可靠。探月车采样机构借鉴、整合了挖掘机前端铲斗和破碎锤的结构,由一个铲斗和钻头组成,在能完成采样任务前提下,机构具有很高的可靠性和稳定性。 二、作品的适应范围及推广前景的技术性说明: “探路者”是为人类探索月球而设计的,可胜任对月球及其它太空天体的探测任务,也可在地球执行任务。 三、作品的市场分析和经济效益预测: 未来探测月球的脚步将越来越快,作为一个探测月球的工具,“探路者”无疑将拥有良好的市场和广阔的前景!
同类课题研究水平概述
- 无