














基本信息
- 项目名称:
- 多驱动仿生机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 分析节肢动物是如何实现爬行和攀爬的,从而找出其运动规律;从节肢动物的爬行和攀爬机理入手,研究仿生机器人的爬行和攀爬机构,包括单体结构,探讨如何实现爬行方向的改变。
- 详细介绍:
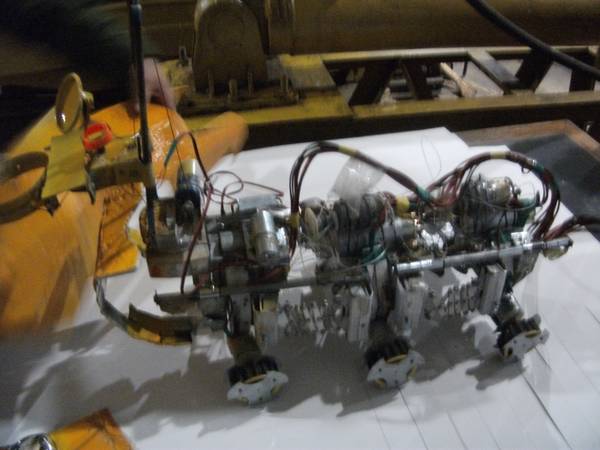
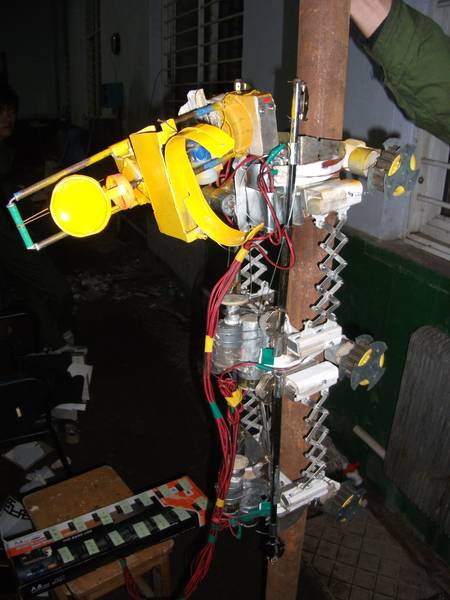
- 根据分析结果设计了方便越障的特殊越障轮,以及适应于杆状物等物体攀爬的蠕动式攀爬臂,实现了集爬行越障、运输探测和变工况柱状物攀爬于一体的综合多驱动仿生机器人。机器人采用特殊的杆机构和绳机构来实现蠕动式攀爬,通过机体两侧的伸缩机构和特殊越障轮实现了平地越障和转向的功能。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 为解决高空作业、远距输送、爆破等难题,通过分析节肢动物是如何实现爬行和攀爬的,从而找出其运动规律;研究仿生机器人的爬行和攀爬机构,设计了该机器人。其采用遥控式高空作业,避免了不安全隐患;它集平地越障、攀爬、搬运、探伤等多种功能。技术指标:1) 自由度大;2) 工作空间大;3) 灵活度好;4)负荷能力较大,能耗少.
科学性、先进性
- 该作品可实现集行走、越障、爬杆、探测与定位“四位一体”的功能,降低了探测、检修高空电缆、高架桥等的难度,在复杂地形及灾难现场可实现行走和攀爬结合的功能,大大提高了探测与定位的覆盖率和准确率。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 专利转让
作品可展示的形式
- 模型 图纸 现场演示 图片 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 多驱动仿生机器人适用范围广,具有结构简单,制造方便,重量轻,耗能少,成本低,效率高等特点,具有领先地位与优势。可代替人工实施高空作业、施工、爆破等危险活动。加之其结构新颖,设计合理,技术先进,节能显著,市场急需,利润丰厚,将获得巨大市场份额及十分可观的经济和社会效益。我国机器人市场正好给试图大力发展机器人的企业提供一个难得的历史机遇。
同类课题研究水平概述
- 目前,应对各种高空作业、远距离输送、爆破等作业都有着不同的设备,但是这些设备都有一个共同的弊端,就是为了完成简单的工作内容,而耗费庞大的设备,造价高,失效后维修成本高,运动不灵活。多驱动仿生机器人具有结构简单,制造方便,重量轻,耗能少,成本低,效率高等优点。该作品可代替人工实施高空作业、施工、爆破等危险活动。加之其结构新颖,设计合理,技术先进,节能显著,市场急需,利润丰厚,将获得巨大市场份额及十分可观的经济和社会效益,具有领先的地位与优势。








