














基本信息
- 项目名称:
- 动态追踪智能机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 把所学知识与实践紧密结合,对机器人做进一步的创新,实现动态目标的追踪等基本功能,并在此基础上拓展某些功能,打造机器人爱好者的实践平台。
- 详细介绍:
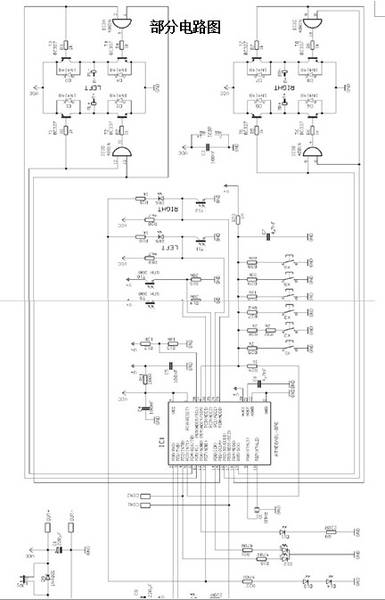
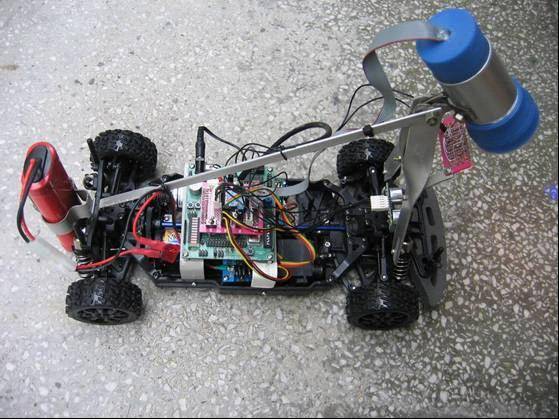
- 主要在于对单片机程序的编写,以追踪机器人为平台,拓展更多的功能,使其智能化程度更高,智能化主要体现在追踪能力,和可拓展性能上。可以实现磁条追踪、视频追踪等追踪能力,也可以给予作品机械臂以实现持、抓物品能力,救援,除障能力,拓展能力主要体现在程序可以任意更改,拓展领域很宽。为广大机器人需求者提供完美的平台。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 通过把所学知识与实践紧密结合,目的在于对机器人的进一步研究,对所研制出的机器人实现动态目标的追踪,使机器人具有避障等拓展功能,本作品对自动化进行了诠释,真正的实现了运作过程中的完全自动化,把所学知识在作品上发挥的淋漓尽致。
科学性、先进性
- 比同类平台更具价格优势。
获奖情况及鉴定结果
- 2010大连海洋大学信息工程学院科技作品立项。
作品所处阶段
- 实验室阶段
技术转让方式
- 资金购买、股权转让。
作品可展示的形式
- 图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 在原有设计的机器人的基础上在某些特定领域内完成功能的拓展,以便实现更多的具体功能,达到更高水平。一个平台满足不同需求。为工业生产,民用创新节省更多的经费,对产品进行外包之后进行批量生产可以给生活带来给多的便捷和乐趣,可以成为家庭的帮手,也可以变成我们的兴趣。
同类课题研究水平概述
- 移动机器人技术是机器人研究领域的一个重要分支,在国际上日益成熟,国内对与此项目的研究尚且薄弱。为了增强我们大学生的动手能力,更好的把我们所学到的知识运用到实践当中,并从中学到更多知识。我们希望通过我们自己的动手能力,制作出一个具有智能追踪移动物体功能的机器人。并且,我们希望通过设计一套基于传感器的智能移动机器人测距定位系统,实现机器人的避障及定位等功能,以便进行拓展。








