














基本信息
- 项目名称:
- 汽车智能照明系统
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 本作品以STC89C52RC单片机为核心控制器件,利用超声波测量汽车会车距离,利用光敏传感器检测行车环境光照度,并对汽车行驶弯道进行实时监测,自动调整汽车大灯照明角度,设计并制作了一套智能汽车照明增强系统。
- 详细介绍:
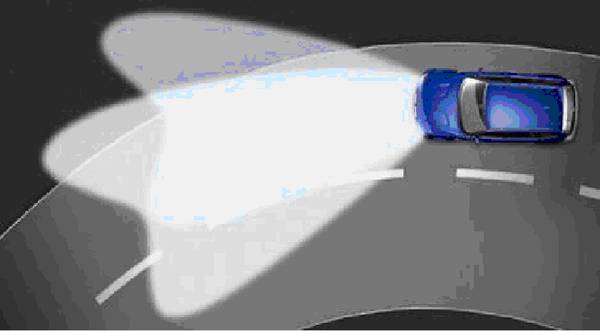
- 该系统可以实现远近光自动切换和弯道主动转弯照明,能够通过光强检测在光强不足的情况下车灯自动打开,并能通过超声波测距检测,当来车相距在一定范围时灯光由远光自动切换成近光,会车完成自动恢复到会车前的状态。若前方近距离仍有来车,将保持近光,直到会车结束。在夜间行驶转弯时,根据车辆转向角度自动调整大灯的灯光照射方向。 设计方案主要包含超声波测距模块、光强检测模块、弯道监测及大灯调整模块,实现了汽车各种照明功能的智能增强,达到了提高汽车安全行驶之目的。 该系统具有广阔的市场应用前景。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 该系统对智能车灯照明控制要求比较高,本作品不像传统的前照灯系统一样,只能在一种固定的模型下工作,本作品能够根据车辆行驶的道路的情况以及外界环境的状况自动的切换车灯的工作模式,产生适合当前驾驶环境的光束模型,为驾驶员自动提供更宽更合理的视野范围,提高行车安全。此系统采用以51单片机STC89S52为核心控制器、超声波测距、光强检测、弯道大灯调整及步进驱动模块。 本项目在以下几个方面有所创新: ① 将增强型超声波测距引入到行驶中的汽车会车距离检测,测量距离、精度和实时性上得到了创新应用。 ② 在动态会车距离算法上进行了中值滤波等修正计算,会车车距更精准,汽车远近灯光切换更及时准确。 ③ 对道路弯道检测上,创新性的提出了触点式前后比较转向判断法,确实当前大灯应调整的角度值,避免了使用成本较高的角度传感器的使用,实现了一套经济的弯道检测方案。 ④ 将光敏传感应用到了汽车环境照度判断上,实现汽车灯光自动开启与关闭的关键功能。 ⑤ 低成本液晶模块应用到了本照明系统显示中,实现了多功能分屏实时显示照明状态。 ⑥ 监测控制主机采用STC89C52单片机,整体结构简单,成本低,整体成本最低可以控制到300元内,相比高档汽车配置国外照明系统2000元以上价格优势,无疑为重要的低成本创新。
科学性、先进性
- 相比采用同类单片机,本作品在程序结构设计及算法上都具有自己的特色,光强检测、超声波测距、弯道大灯调整及步进驱动都采用独立的模块,因此,相互之间不会产生任何干扰。未见其视屏提示功能,本作品加有视屏显示功能,能显示夜间汽车行驶状态。
获奖情况及鉴定结果
- 作品于2011年4月中旬在重庆文理学院校团委《第十二届“挑战杯”》评议小组进行评审,其鉴定为全国大学生课外学术科技作品竞赛科技创新发明B类。 重庆文理学院特等奖
作品所处阶段
- 试验阶段
技术转让方式
- 技术出售
作品可展示的形式
- 实物、现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品操作十分简便,只需要给本作品提供5V的直流电就可正常运行,无需任何调试和设置。本作品每个模块的硬件电路都是采用技术成熟、稳定性好、运用广泛的基本电路,该系统的时时性好、判断准确、抗干扰能力强。本作品可适用于任何车型,通过光强检测、超声波测距、弯道监测,最终实现汽车车灯自动开关、会车远近光切换和主动转弯照明,提高人们的汽车驾驶品质,使汽车驾驶更加安全,使汽车性能更加完善。从而减少因照明而发生的交通事故。 现代交通密度的加大,行车安全已经成为人们要解决的当务之急,而传统前照明等无法及时调节照明角度,常常会在弯道内侧出现“盲区”,极大地威胁了驾驶员夜间的行车安全。随着科技的进步,传统照明系统存在着许多的问题,在驾驶中面对复杂的道路条件和行车状况是,交通安全依然存在着巨大的隐患。作为汽车的三大安全之一,汽车照明系统是最主要的主动式安全装置,对传统汽车照明系统的改进和创新也日益成为全世界汽车厂商研究的热点问题。其是一个有重大意义的研究项目。
同类课题研究水平概述
- 文献[1] 基于CAN总线的汽车智能照明系统,2008,吉林大学,何磊 本文确定了智能照明系统中进行智能控制的车灯种类及控制目标。在遵循国家标准的前提下,提出了本系统中远光灯、近光灯、后雾灯的智能控制策略,并利用提出的控制策略对车灯进行智能控制。 本系统对智能控制策略中需要得到的车速信息、雾天的浓度信息及光强信息提出了采集与实现的方法。根据这些参数的特点,确定使用脉冲测速法采集车速信息、使用湿度传感器采集雾天的浓度信息、使用光敏电阻采集雾天的光强信息。结合车灯的结构特点,对车灯控制部分提出了控制与实现的方法,确定了使用步进电机控制车灯的角度变化,使用数模转换器和放大电路控制车灯的光强变化。 根据上面提出的实现方法,本系统完成了车速采集节点、光强采集节点、湿度采集节点、车灯控制节点的硬件与软件设计。同时,建立了基于CAN总线的通讯网络,设计了CAN总线的应用层协议,规定了CAN总线的通讯机制及总线传输速率。用建立好的通讯网络,传输各种车灯智能控制时需要的参数信息及开启与关闭命令。 本系统对远光灯、近光灯及后雾灯进行了基于汽车台架的实验,验证了智能控制的正确性,实现了系统定义的功能。 文献[2] 汽车智能照明系统的研究,中国水运(下半月) 2009(3),杭州电子科技大学电子信息学院,束华明; 高明煜 汽车智能照明是一种在弯道上及时对前照灯灯光调节控制的系统,该系统极大提高了夜间行车安全。本文介绍了其基本组成和工作原理,提出并分析解决了系统方案,最后设计了系统的软硬件。 文献[3] 自适应前照灯系统(AFS)应用及发展趋势,CJFD收录刊,2010(3),福建交通职业技术学校,长安大学汽车学院,林坦,戴广超,李新伟 传统汽车前照灯系统因照明模式单一及在实际操作中的诸多问题,在面临复杂的道路条件和行车状况时,交通安全面临重大隐患,使得具有自动适应车辆行驶状态的前照灯系统(AFS)备受关注。本文简要介绍了AFS的研究背景,对比阐述传统汽车前照灯系统与AFS在几种模式下的应用,并对将来这一新技术的发展趋势进行预测。








