














基本信息
- 项目名称:
- 自适应地面应急救援辅助机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 该作品以灾后救援为主题,设计了一款自适应路面应急救援辅助机器人,可在灾后第一时间辅助救援人员快速准确的完成救援工作。该机器人采用模块化设计理念,具有结构新颖、越障避障能力强、可适应各种复杂路面的特点;雷达及全球定位系统(GPS)的应用确保了信号检测和定位的准确性。该机器人实用性强,具有较高的推广价值,可向军事等领域推广应用。
- 详细介绍:
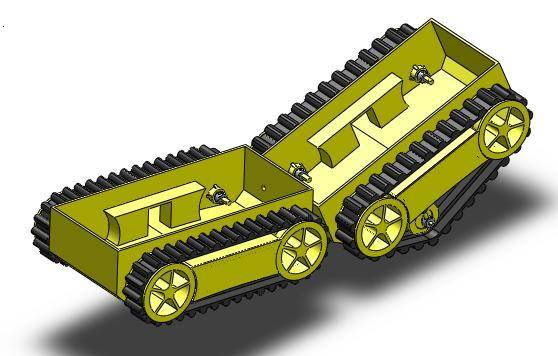
- 本项目设计的自适应地面应急救援辅助机器人采用模块化两厢式结构,履带传动的行进方式,越障能力强,能够适应复杂地形。该救援辅助机器人采用雷达扫描生命信号,并配有全球定位系统(GPS)与摄像系统,可在灾害发生后的第一时间将探测到的生命信号以及周边环境实时图片发送给救援人员,提高救援的速度与准确性。同时该车后厢可以装载药品、水等灾后急需物资,可利用机械手臂送到受困人员面前。同时避免了二次灾害,保护救援人员的人身安全。本项目设计的机器人具有结构新颖独特、越障能力强、信号检测稳定、体积小、经济实用等特点,非常适于推广应用。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 新型的自适应地面应急救援辅助机器人能够在灾难发生后辅助救援人员在第一时间准确的救助受困人员,在快速准确救援的同时也可确保救援人员的人身安全。 1、通过利用前车厢三角履带模块与模块化两厢式结构,使其越障能力由同体积车体的8公分提升到18公分。 2、利用自适应雷达红外探测传感器探测生命迹象,利用受控雷达微波以及主动红外探测相结合的模式,使得探测距离具有可控性,能够快速的探测到生命迹象,辅助救援人员在第一时间快速的救助受灾人员。 3、利用SIRF Star III全球定位系统实现自适应地面应急救援辅助机器人准确定位,能够探测到生命迹象的第一时间将具体坐标发送给救援人员,实现救援过程的准确性。 创新点: 1、在自动控制模块的基础上自主创新研发,增加半自动控制模块,更好的实现人机交互。便于辅助救援人员对受灾人员的救助。 2、采用自主研究设计的三角履带模块与两厢式结构相结合的方法。既提高了越障高度,又保证了行进速度,同时弥补了三角履带行进的稳定性,使机器人具有极强的自适应地面能力。 3、利用受控主动雷达微波来控制被动红外传感器,从而实现了红外探测距离的可控性,快速准确地进行生命探测。 主要技术指标: 1、自适应地面应急救援辅助机器人几何尺寸为长76cm,宽22cm,高15cm。 2、自适应地面应急救援辅助机器人行驶速度为0.58m/s。 3、自适应地面应急救援辅助机器人充电一次工作时长3h。 4、自适应地面应急救援辅助机器人跨越高度为18cm。
科学性、先进性
- 1、先进的路面自适应能力。 采用单节双履带设计以及附有支撑轮的三角履带设计。可跨越最高障碍物达18cm;转弯角度9度;行驶速度达0.58m/s。同时可在石渣路、湿滑路面等各种恶劣路面良好稳定工作。 2、准确快速的生命探测能力。 采用自适应雷达红外探测器,结合雷达探测与人体生物电场感应法的方式,避免恶劣条件而产生的影响。并且较光学探测与声学探测探头可视区域得到进一步的提升,同时具有较强的穿透性。 3、稳定快速的信号定位能力。 采用全球定位系统与实时摄相结合的方式,GPS采用SIRF Star III,追踪灵敏度为-159dbm、精确度位置为10m,2D RMS、判断速度最快可达515m/s。在确保工作及环境中的定位的同时,传送现场的第一视角录像,为救援人员提供更好的救援保障。 4、独特的车体模块化设计。 采用模块化分体式结构,两车厢通过中间铰链相连接,实现相对运动,大大提升了越障能力。实验得单厢式车体与模块化两厢式车体在行进时的性能参数得,两厢式车体可爬越高度远大于单体式。
获奖情况及鉴定结果
- 无
作品所处阶段
- 中试阶段
技术转让方式
- 专利
作品可展示的形式
- 1、实物、产品2、模型3、图纸4、现场演示5、图片6、录像7、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点和优势: 1、具有强的越障能力和路面自适应能力。 2、具有快速的生命探测能力。 3、具有准确的信号定位能力。 4、具有独特的车体设计方案,进一步提升了越障能力。 适用范围: 此项技术应用于灾害现场的第一时间应急辅助,帮助救援人员在最短的时间内确定受灾人员具体位置。 市场分析和经济效益预测基于SWOT理论分析: Strengths:该项技术对我国灾后救援将产生重要的影响。它将成为救灾的主要辅助设备和灾情发生地第一现场的主要工作人员。 Opportunities: 在未来,野外搜救,动态监控,数字化军队等都是该项技术应用的广阔舞台。其潜在的经济、市场,国家安全的价值十分巨大,很难用具体的数字衡量。 Threats:在未来,传感器技术更加成熟,感应更加准确,可能会有生命探测飞机将其替代。 该项技术对我国灾后救援将产生重要的影响。它将成为救灾的主要辅助设备和灾情发生地第一现场的主要工作人员。在未来,野外搜救,动态监控,数字化军队等都是该项技术应用的广阔舞台。
同类课题研究水平概述
- 机器人技术是集机械、电子、自动化控制等多学科应用的技术。机器人通过自身携带的传感器在无人参与的环境下,自主壁障越障等复杂行为,可以实现人类在复杂环境下无法完成的任务。与人类相比,移动机器人不仅弥补了人类无法适应某些恶劣环境的探测问题,而且具有经济性,高效性,快速性等优势,特别适合于在恶劣条件下进行移动,实时探测,完成相应任务。 近年来, 我国消防机器人的研制工作得到了政府有关部门的支持。1995年上海市科学技术委员会批准公安部上海消防科学研究所着手研制我国第一台消防灭火机器人— 自行式消防炮, 目前该项目已通过验收并顺利进入产业化准备阶段1996年11 月国家科学技术委员会以国家“863”计划批准公安部上海消防科学研究所、上海市消防局等四家单位共同研制“ 消防机器人” , 该消防机器人具备火场化学危险品侦察、灭火等多种功能, 目前研制工作已接近尾声, 并计划尽快完成消防侦察机器人的产业化准备工作, 与前期完成的灭火机器人一起装备消防部队。 2010年7月,洞穴搜救机器人在北京进行了联调集成实验。 洞穴搜救机器人可在复杂的废墟环境中移动。这款机器人主要是用于信息采集,可代替人进入仍存在余震、结构极不稳固的倒塌废墟中寻找被埋的幸存者。洞穴机器人身上安装的生命探测仪,可以探测到被埋者的温度和心跳,为救援人员提供准确的信息。 日本研究的基于移动机器人的救援机器人RoboCue能进行救援操作。RoboCue是菊池制作所针对日本东京消防厅开发的救援机器人,能进入人类救援队不能去的地方寻找受害人,比如火势凶猛的房屋、爆炸或弥散毒气的现场。它配备超声波传感器、红外照相机,先使用两个试探臂识别受伤者,再缓缓地用双臂将伤员装载到一张类似雪撬的床上,撤回到安全地带,如果需要的话,它还能提供随身携带的一个氧气罐。 该作品解决了灾害救援过程以下几个技术难题: 1、探测精度不足,无法快速定位受灾人员的问题。 2、自适应地面性具有局限性,跨越障碍能力不足的问题。 3、操作维修复杂等难题。 综上所述,自适应应急救援辅助机器人具有强的越障能力和路面自适应能力、快速的生命探测能力、准确的信号定位能力、独特的车体设计方案四大优点。由于其独特的车体、履带设计,极大的提高了机器人的机械能力。可在军事、民用和科学研究中得到广泛应用,包括航天、海洋、军事、建筑、农林、商业服务和灾害救护等。








