














基本信息
- 项目名称:
- 模块化多自由度写字教学机械手系统
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 开放的写字灵巧手主要用于教学领域,解决学生用教学机械手类实验仪器的结构庞大,可实现的自由度低,动作功能单一,价格昂贵,实际控制复杂,可实现的实验项目稀少和不利于开展科创研究学习等问题,填补了教学领域机械手拥有高灵敏度、高精确度自动闭环控制回路的空白。
- 详细介绍:
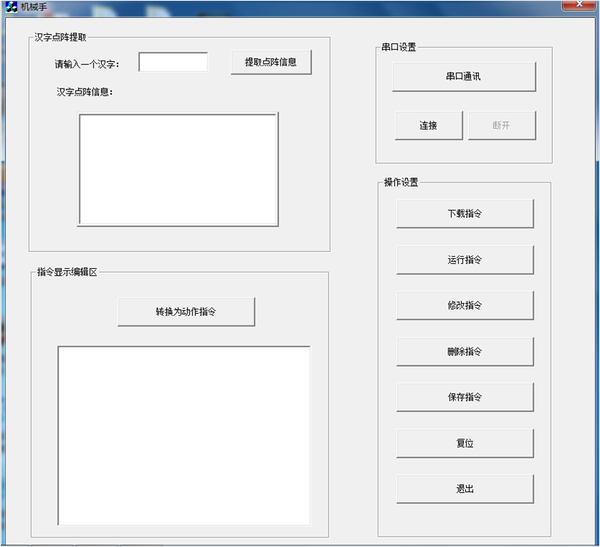
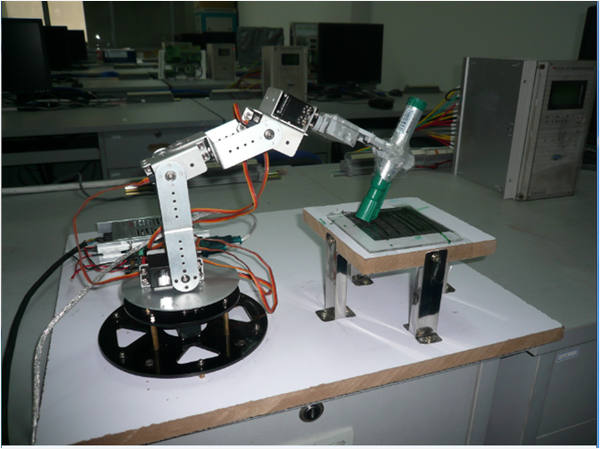
- 本项目小组研究的写字灵巧手正是以教学机器手为研究主旨。写字灵巧手系统实现写字主要由2大部分组成,第一部分,硬件机械手平台,利用AUTOCAD软件建立模型,以功能模块化与结构模块化为设计目标,进行模型设计,并在PROTEL中反复仿真、调试,确定灵巧手各部位最佳状况。在实际空间中建立空间坐标模型,完成机械手写字的基础工作。第二部分,软件设计及算法优化。本项目主要是以VC++软件为主要工具,自主开发软件平台,来完成对信息采集、信息加工、自定义规则等内部算法的自动控制,同时通过对材料选择,控制制作成本,进一步实现灵巧手应用的简易化、智能化、普遍化。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 发明创新点: (一)独立设计机械手,遥控装置,移动底盘等结构。 (二)自由设计机械手上位机软件,实现写字控制。 (三)模块化设计机械结构,全部部件均可自由拆装及改装。 (四)教学机械平台首次实现闭环自动控制功能,自定义算法及书写规则。 (五)仪器结构向使用者全面开源。 (六)实验系统设计适用面广。 技术关键: 独立设计机械灵巧手、摄像头定位等装置,配合上微机软件结构,使机械手在实际空间中能书写对应汉字。克服机械手末端操作单一、活动空间小、缺少灵活性、难以精确控制等缺点。使机械灵巧手指端加装针形摄像头,能够实现跟踪定位最终实现中文精确书写功能。具体实现写字分四步。 第一步:计算机屏幕输入简单汉字,通过ucdos字库自动调用其点阵信息。 第二步:利用已确定的【点阵-坐标】转换算法进行计算,在实体模型中将各个点阵信息转化为三维空间坐标。 第三步:通过运动方程计算,进行空间【坐标-角度】转换,最终确定灵巧手各舵机角度值。 第四步:自定义书写规则,实现书写功能
科学性、先进性
- 技术先进性: (一)上位软件的设计,以及与电路控制接口板的有效通信和数据传输,实现机械手的有效动作同时尽量减低指令复杂度,来实现控制6自由度的教学机械手或是进行多个高自由度机械手系统综合仿真的舵机协同动作。 (二)通过内嵌算法及书写规则的自定义,机械手可到达任意指定的三维空间坐标相对应的位置,实现自动闭环控制功能。填补了教学领域机械手拥有高灵敏度、高精确度自动闭环控制回路的空白。 (三)教学机械手各个功能组件的设计,手抓头,前臂,后臂,固定转盘等部分;机械手系统可移动底盘的设计;机械手主控制电路板及无线通讯部分的整合设计。 (四)教学装置机械结构开放式的创新设计,涉及到多种教学实验仪器的快速插接转换功能模块以及系统可以搭载其他实验仪器,进行数据收集测试的额外部分。
获奖情况及鉴定结果
- 2011年评为上海市第二届大学生科创论坛“百佳项目” 2011年评为上海市第二届大学生科创论坛“百佳论文”
作品所处阶段
- 中试阶段。已完成预期功能,还需做些改进,计划量产。
技术转让方式
- 暂无
作品可展示的形式
- 实物 现场演示 录像 图片 产品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 模块化多自由度写字教学机械手系统在使用上十分方便,机械手本身带有经过测定标准的试验机构装置装配图和关键组件的组合说明,供实验者学习。同时机械手会有验证性实验和组装创新实验两个部分不同的装置使用说明。在实际的学习和创新过程中,试验者可以根据自己的试验目的不同,参考不同试验指导说明书。主要的使用操作流程为: (1)实验目的确定; (2)仿真组件选取; (3)模型组装; (4)上位软件算法编程; (5)总装测试。 机械手本身设计目标就是:结构紧凑,功能多样,可实现的实验项目丰富,同时由于是开放型电路板和上位软件,相关的成本得以控制。总的装配生产价格相比现在市场上的在售产品有不小的成本优势。此外,模块化多自由度写字教学机械手系统装卸维护方便,可以仅更换部分零件就能转变成其他实验室的实验项目仿真平台,实验装置的利用率高,性价比强。我们的目标对象主要是高等学院相关理科专业的学科实验室以及专科相关专业的实验室,还有鼓励学生科创等素质教育的高中学校。
同类课题研究水平概述
- 国外产品相比我们国内目前的机械手平台有了很大的进步:首先体现在产品的体积上。慧鱼三自由度工业机械手平台不过25*20(cm),相比之前我们一个气动机械手要一个以上工作台来摆放设备的规模,体积得到了大大的缩小。同时缩小的还有使用者的知识储备程度,慧鱼和乐高图形化的编程平台让使用者很容易上手,通过限位开关和电机配合,几个简单的指令就可以让机器转动起来,这就为学生的创新实验提供了可能。硬制塑料件不容易损坏,较小的体积可以让人快速的完成构想。这一期间我国有了不少这种慧鱼、乐高等等公司产品的实验室,不但能够进行教学实验,同时也能服务于学生创新实践的要求。也出现了很多基于慧鱼模型设计的研究,如机械手远程操作实验嵌入式控制系统,慧鱼教具在大学生创新中的探索性研究。 但是,这些公司的产品也和我们中国的教学现状有着不可调和的矛盾。首先,价格还是一样的高昂,甚至有时加上独立的传感器装置,充电电池组,无线遥控模块等等部分以后,价格可以高得让人乍舌。其次,过于强调整体的便捷性和维护的简易性以及一些其他方面的技术保护原因,导致产品出现了过多的封闭模块,这很不利于进一步的开发研究,同时也不利于平台功能拓展。简单举例,以慧鱼来说,当我们想把工业机械手模型和移动模型包提供的移动底座拼接在一起时,甚至由于各组合包之间都存在的不可兼容性,导致我们不得不去掉机械手上的一部分功能,才得以实现这个平台的整体组合。这只是冰山一角,整个装置的核心——控制接口板和它的上位机软件,全部都是不开放的。这才是最致命的问题,慧鱼的装置是基于欧美80-90年代主流的产品做得仿真,故而仿真精度只有最高3自由度,而且是老旧的直角坐标系行动方式。这在现在看来,简直低的要命,老旧的可怕,同时它拒绝修改。 我们的优势: 优点: (一)基于模块化设计的机械结构紧凑,可实现实验设备的快速组装,零件利用率高; (二)自主开发的上位软件和单片机硬件平台能最多控制达32自由度的机械手动作,控制范围宽广; (三)丰富的外部设备设计,如移动底盘,无线控制,传感避障装置等的综合利用,使教学机械手的应 (四)实验范围广,可实现实验项目多等特点。








