














搜索

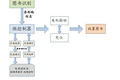
作品简介: SR6小型机器人是本小组在我校电气与电子工程学院足球机器人项目中,自主研发的新一代小型足球机器人。整车最大水平投影半径178mm,车高147mm,车重约2.2Kg。 整套SR6由车载、视觉、通信、决策系统构成。其中车载系统是小型足球机器人的核心,它由行走、击球、带球、通讯等子模块组成,其功能是与其余系统通信,并执行决策系统的指令。

作品简介: 我制作的是一个能在专用的比赛场地上进行比赛的足球机器人。它可以在一定范围内发现任意角度上的红外足球,并记方向,之后自主追球。接触到球后,它能带球进攻,冲击对方球门。当对方的机器人前来抢球时,双方会争球,此时可能会出边界,所以我给它增加了自主规避边界的功能。而且争球的时容易出现僵持不下的情况,对此,我给它开发了以一定的角度拨球的功能,这样能够有效地摆脱对方防守机器人的纠缠,提高进攻效率。

作品简介: 我们的作品——家庭服务型机器人,用凌阳SPCE061A单片机作为控制核心,结合STC12C5A08S2单片机、超声波传感器、红外传感器等实现机器人的行走定位等相关操作。作品引入语音识别技术,可以让机器人和人之间进行简单的交流,使机器人不再是冷冰冰的物体,而是实现和人的互动成了真正的“人”。 作品引入自动控制技术,使机器人能够自主进行简单的操作。作品选题新颖,理念成熟,具有一定的应用价值和推广价值。

作品简介: 本作品是一款集侦查、搜索、破拆、抓取、排爆及可视化通讯六大功能为一体的智能化反恐排爆设备。智能控制部分:由上位机和DSP+CPLD及MEGA16核心控制板组成,并涵盖RS232、RS485、CAN通信技术;车载两个CCD摄像头。机械部分:由履带同步旋转行走机构;可更换的螺旋钻头、圆锯以及防爆推铲组成的破拆防爆机构, 6自由度的机械手臂组成。可适用于多种场合,实现现场监测、反恐排爆等作业。

作品简介: 快速反应潜水艇机器人是一种新型的水下机器人。它的设计颠覆了传统的潜水艇依靠浮力和重力实现上浮下潜的方式。巧妙地将直升机的空气动力学原理与潜水艇的驱动系统相结合,使潜水艇机器人具备快速反应的能力。
作品简介: 学校图书馆每天都有上万本图书借出和归还,这对图书馆的管理人员来说无疑是一个很大的负担,他们每天都要先对图书进行整理分类,然后再把图书送到相应的书架上,全手工操作,不仅工作量大,而且效率较低。针对这种现状, 我们设计了“智能图书管理机器人”来代替人力,让机器人来对图书进行识别分类,再把分类好的图书送到相应的书架上,以达到减少人力、降低工作强度、提高工作效率的目的。

作品简介: 综述智能机器人模拟现实环境搜索的系统控制,分析搜索算法与程序效率优化,研讨查找目标的程序设计方法实现,阐述控制电机和传感器技术应用,及驱动机器人的编程思路,运用二分法优选查找定位、最短路径算法等,按路径长度递增次序生成各顶点最短路径序列等实现高效搜索,并探索进一步扩展智能机器人优化搜索的编程途径。

作品简介: 本系统设计的是一款能实现地震搜救的双足步行机器人,能够像人一样直立行走,且具有避障,定位,寻物,生命体探测等功能。系统采用了机械结构设计技术,多路舵机的控制技术,机器人步态规划技术,很好的解决了机器人行走平衡问题。同时系统还采用了无线视频传输技术,实时的将机器人探测的信息及时传送到控制中心,极大地方便了搜救工作。

作品简介: 阐述智能机器人科技制作课题的设计和实施;解析机器人作为发展学生科技创新才能的有效资源,研讨电子信息技术整合智能汽车技术理念,对培养大学生综合实践技能和创新思维的重要作用;综述智能避障机器人制作系统结构硬件和软件控制原理;归纳实践技能和创新思维科技竞技成果;探讨进一步扩展智能机器功能的实践途径。

作品简介: 针对地震灾后环境特征,利用SOPC技术和NiosII软核处理器设计并实现了地震灾区幸存者搜索定位机器人系统。系统采用组合式履带移动车体结构、脱机工作方式、自主导航,并采用双操作系统,能够灵活行进、越障、爬坡,具有超声波激光避障、人体检测、声音采集定位、广角度现场视频采集、温湿度、烟雾指数检测、光控照明、GPS卫星定位、电子罗盘定向、Zigbee无线组网通信、上位机与手持终端远程监控、运输等功能。

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。
上一页 1 下一页
