














搜索

作品简介: 月球车(亦称“月球探测远程控制机器人”)是在月球表面行驶并对月球考察和收集分析样品的专用车辆。针对月球表面复杂环境而设计各种独特机构和控制系统, 使该车具备强大的驱动力、优越的越障爬坡性能、平稳运动功能及很强的通过性能。 创新点及关键技术: 1八轮独立驱动系统 2八轮独立转向系统 3八轮臂协调垂直伸缩运动系统 4 “双子星”车体结构及协调控制系统 5双连杆柔性机械臂系统 6计...
作品简介: 熔融指数仪多功能控制器是一种模块化、通用化的熔融指数仪控制器。该控制器体积小巧、测量精度高、价格低廉,可广泛应用于各种型号熔融指数仪的升级换代和维修。

作品简介: 本项目主要以单片机处理技术为核心,采用串口通讯、无线通讯和多传感器融合等技术,通过智能算法实现机器人自主搬运、太阳能自主采集、能量无线补给、机器人之间协同作业以及上位计算机无线监控等任务。 作品分五部分:(1)搬运机器人采用智能算法自主寻线,辨识装卸位置,伺服控制装、卸,完成自动搬运任务。(2)太阳能机器人通过红外和碰撞避障,远红外追光,太阳能板多自由度摆位以及智能导航,并实现光线...

作品简介: 在小浪底水库水沙分级管理中,小浪底库区泥沙含量检测是其中的关键环节之一 。由于浮泥层的存在和库区底部水生植物的影响,小浪底库区泥沙含量检测就成为一个难题。目前现有的一些测量小浪底库区泥沙含量的仪器和方法,在实际应用中存在着一定的局限性。 本作品采用了电容式差压方法来测量小浪底库区泥沙含量。经多通道信息采集和数据融合,系统不仅能检测含沙量,而且还能同时检测测点的深度、水温以及传感器的倾斜度,使...

作品简介: 本作品属于医用清洗设备,应用于医学免疫实验中对微孔反应板的清洗和去除残留液体。 本作品采用机、电、光等技术,全部清洗过程由微电脑控制自动完成。采用立式简状回转机构和微孔注射板滑动装置组合,应用回转离心的工作原理完成微孔的清洗与残留液体的清除工作,一次全自动快速完成原来需要两步完成的内容。 整个过程是在一个密闭的装置中进行,可解决现有洗板技术中存在的问题,不仅可缩短清洗时间,提...

作品简介: “矿用救灾蛇形机器人”是针对我国地矿资源丰富,赋存条件复杂,频发矿难和震灾的现实研制的。作品主要用于矿灾或地震后极端环境的探测搜救工作。作品体积小,结构简单,能实现模拟生物蛇的多种真实运动形态,其各电路模块具有保证井下瓦斯环境下的本质安全和自安防爆功能。通过智能系统的控制和搭建传感测量系统,能进行灾后极端环境下的多维时空事故信息探测和人员搜救,为抢救方案的制定决策提供最直接依据,有效节约挽救矿难人...

作品简介: 本项目提出一种既可以像直升机那样实现竖直方向的悬停、垂直起降以及高机动性,同时又可像固定翼那样利用机翼的升力进行相对低能耗的长途奔袭的无人机。 在不同飞行任务下,无人机可以变形,在四叶桨飞行器和固定翼飞行器之间进行切换,从而满足不同环境的需求。无人机垂直起降或者需要减小无人机尺寸时,其翼端折叠,为四叶桨飞行器;当巡航飞行时,翼端展开、涵道翻转90°时为固定翼飞行器。 垂...

作品简介: 我国城市地铁轨道交通现已进入快速发展阶段,在看到市场效益的同时还应看到地铁发展中还存在着较为突出的问题,如运行故障、信号灯失灵等现象时有发生,严重威胁地铁的安全运行。本设计着眼于地铁信号指示环节的改进,运用先进的电磁兼容技术、PWM技术、电流自适应匹配技术,设计一种大功率、拥有智能化故障检测功能的新型地铁交通指示系统,光信号有效传输距离不小于750米,能耗降低70%,整机功耗不大于24VA...

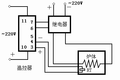
作品简介: 作品设计的目的: 1 利废。(能点燃断灯丝的废弃灯管) 2 节能。(经专门仪器测量:整机消耗的总功率30W的灯管约16W,40W的灯管约23W。几乎可以达到省一半电的效益。) 3 环保。(该装置在设计上不存在电磁振荡电路,所以不会产生电磁辐射污染;避免废旧灯管水银泄露的二次污染。) 4 抗雷击。(电容器耐压高,故雷电损坏率极低,可防雷。) 5 寿命长。(不存...

作品简介: 1.项目简介 本项目是一种新型服务类机器人,综合运用了机械、计算机、传感器等技术,可以模仿交通警察的肢体动作指挥交通,代替交警站岗;根据道路运行情况做出智能判断、人性化的控制通行时间;对违规车辆进行自动抓拍,并将图片传送至电脑储存。 2.创新点 实现交通要道的全天候监控,将交警从恶劣复杂的环境当中解脱出来;根据复杂的交通状况灵活控制通行时间,缓解交通压力,改善交通秩序;违章抓拍系...
上一页 1 下一页
