














搜索

作品简介: 本项目为设计动力自主的无缆六足步行机器人。可用来在各种不平整地形上进行高速运动。受节肢动物生物力学的启发,它的四肢采用的是具有单自由度的无边单辐轮子,并且具有良好的刚度和柔顺性,就像蟑螂的腿一样。基本步态规划使用一种时钟驱动的三足步态,这就保证了机器人具有鲁棒性和耐用性,而且它能够保证以比较理想的速度在平整体面、坡面、沙地、草地、泥沼、楼梯、断裂面等各种情况恶劣的路面上行走。

作品简介: 本设计的全自动模糊洗衣机,充分应用了模糊控制技术,在硬件上首次采用交流变频技术,可以根据不同布质调节电机转速以达到节省时间和保护衣物的目的。软件上通过多次检测自动修正洗衣时间和电机转速,使洗衣机始终处于最佳运行方式。它操作简单,省心省力,抗干扰能力强,成本低,省电。
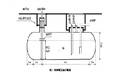
作品简介: 加油站由于地基变形等原因,使得灌容表标定值产生偏差,因此需要对罐容表进行重新标定。本文应用实验数据拟合,以及微元法研究了储油罐发生纵向变位、横向旋转时对罐容表的影响,通过采集的数据对储油罐进行变位识别,实时计算实现罐容表的重新标定。
作品简介: 建筑施工现场临时用电一般没有通过专业设计,存在很多安全隐患,很多安全事故都是由临电做的不合理导致,于此我根据有关资料总结了一套施工现场临电设计的方案。
作品简介: 本文设计的电路,同时把加热与降温电路分开,保证了设备的工作精度,更好的控制温度范围。

作品简介: 针对组合仪表检测特点,设计并实现一种以图像处理单元(GPU)为核心的机器视觉仪表检测方案。
作品简介: 建筑减震与加固的重要性。
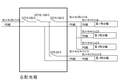
作品简介: 本品具有体积小、功耗低、外扩功能强,测量精度高等特点。 在硬件电路设计中,运用噪声匹配理论,来减小噪声干扰;采用直流斩波动态校零技术,来抑制零点漂移;电导率测量中利用频率、幅值可变的交流方波源作为激励源,来降低测量电极的极化效应;采用双频率法,消除电导率测量过程中的电容效应。 在系统应用程序的设计中,实现模数转换器的驱动、串口的驱动,LCD屏的驱动及上述算法的编程
作品简介: 灵巧手一般指自由度不少于9、手指数不小于3的机械手,由于各个灵巧手设计方案不同,所以每一款灵巧手都有着独特的控制方式。本作品基于现有的灵巧手,设计一套基本动作集,为以后五指间的协调控制打下设计基
上一页 1 下一页
