














搜索
作品简介: 本作品涉及一种集宏微驱动、高精密检测、微纳米级力学性能测试和原位观测为一体的高性能微纳米力学测试系统,解决了现有测试装置体积大,无法实现原位测试的问题,利用研制的样机开展了压痕试验,并在SEM内成功实现原位压痕试验。本作品填补了我国在该领域的空白,将在军工、制造业、飞机汽车行业、精密光学、纳米技术、半导体与微机电行业、仿生材料和医用材料、生物医学、材料工程业、钢铁冶金等领域发挥重要作用。

作品简介: 本作品设计了一种新概念扇翼飞行器——扇翼机,其飞行原理与现有固定翼、旋翼飞行器的原理不同,它是在机翼上表面安装横流风扇,利用风扇旋转时产生的升力和推力供给飞行器进行飞行。该飞行器具有超短距起降、大迎角不失速、操纵控制简单、低速飞行稳定性和安全性好等优点。它比直升机结构和操控系统简单,巡航效率高;比固定翼机起降距离短,低速飞行时有效载荷大,是一种性能介于直升机和固定翼机之间的新型飞行器。

作品简介: 本作品是一种用于500kv六分裂高压架空线路巡检和维修的机器人,具有常规的线路巡检功能,并且可以用自身维修机械手对出现的线路故障进行修复,可实现自主上、下线,线上自主行走、越障等,动作迅速、高效,并可以在自身出现故障时完成自救。同时可以作为高压线日常维护工作的机器人移动平台,拓展出多种带电作业功能。

作品简介: 多功能车是为满足人们对多样化、智能化的需求,故生产的一种适应能力极强、智能化的新型越野车。其技术实现了车的智能化控制,车在行驶时能够根据路况自行进行优化控制。同时多功能车拥有大幅度的减震机构,后桥传动轴能够大角度摆动,既符合高速重心低,又符合越野底盘高的要求。更重要的是其底盘可调范围广,是其他同类产品所无法比拟的。此外,其自动化控制是大学生科技制作的又一亮点。

作品简介: 新型齿轮-叶片组合式液压泵是一种兼具齿轮泵和叶片泵优点的液压元件,它利用齿轮传动作为泵的动力来源,利用叶片实现吸排液,从而将齿轮传动的稳定性和叶片泵的大排量结合在一起,使排量比同尺寸齿轮泵增加30%,机械效率提高40%,达到了现代工业对液压元件的高可靠性和大排量的要求。此外该泵还可反转作为液压马达使用,具有多用途功能。

作品简介: 云台可三轴精确定向的无人直升机系统项目秉承设计、制造、飞行简单可靠,最终成果实用性强、性能优异的理念;所研制的直升机平台在云台可三轴精确定向、系统减震、复合材料轻强化设计等方面,都具有较好的创新性。该飞机是由上下行无线舆链路、微波、控制器、地面监视装置等组成,实际上是一种可便携的空中机器人系统,飞行结果表明,研究成果在航拍、航摄以及空中监测与跟踪方面有较广泛的应用前景。

作品简介: 本作品构造了一种集小水线面三体船、水翼艇和冲翼艇三者优良性能于一体的新型高性能复合船型——水面监测复合三体无人冲翼艇,突破了目前国内外只选用刚性充气艇和单体滑行艇作为无人艇平台的局限性。同时开发了其水面监测(包括目标监测和风浪流等环境监测)功能和避碰功能,在弥补海洋浮标的缺陷之余,能够大大降低人员成本,可应用于目标监测、水文信息监测、水面巡逻、水面缉私等领域,拥有显著的应用价值和产生好的经济效益。
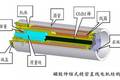
作品简介: 作品“磁致伸缩式惯性冲击精密直线电机”采用稀土超磁致伸缩材料(GMM)为驱动源,基于惯性冲击运动原理,提出了一种新型精密直线电机。 电机以锯齿波形电流为驱动信号,可实现双向直线运动,并能实现精确定位。经测试,样机的位移分辨率优于0.05μm,最大速度大于200μm/s,能够以低电压驱动,驱动能力强(大于10N),可实现无缆驱动,运动稳定性好。
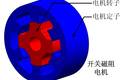
作品简介: 本作品将开关磁阻电机和磁轴承有机结合,首次采用双端对称三自由度磁轴承结构,对系统进行综合设计,使电机转子稳定悬浮在定子中央,实现7.5Kw开关磁阻电机35000rpm稳定悬浮运行,线速度达到141m/s。开关磁阻电机摆脱普通机械轴承的束缚,可以达到更高的转速和功率等级,拓宽了开关磁阻电机的应用范围,在多电/全电飞机、起动/发电系统等高速大功率领域具有非常广阔的应用前景。

作品简介: 本作品由秸秆切碎装置、旋耕(条耕)装置、深施肥装置、播种装置、起垄装置、镇压装置等组成。由中型拖拉机配套牵引。秸秆切碎、旋耕(条耕)、深施肥、播种、起垄、镇压5道工序联合作业,其中播种、起垄可互换。该作品还配套了电磁激振器对播肥头施以高频振动,实现了播肥头的顺利脱土以及肥料的不堵塞,在侧边立轴上安装应变片及应变信号接受环,提高了作业的安全性,还对播种、施肥实施实时监测,保证了工作的可靠性。

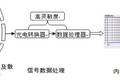
作品简介: 完成了一套在线中子测水系统的研制。采用了更加合理的热中子探头,降低了对中子源的要求,提高了安全性,并在一定程度上节省了成本。此外,本项目在核信号处理系统中加入了功率放大电路,提高了信号的传输能力,有效实现了控制室和放射源的分离,降低辐射威胁。输入到机箱的信号经处理还可以反馈调节生产线的生产。 研制的样机正在一家玻璃厂试用中。

作品简介: 本作品借助由温控仪、变频器和循环泵等组成的,基于流体流量控制的恒温控制系统,实现太阳能热利用的中低温段恒温控制。通过热电阻采集系统温度的变化量,经系统PID参数控制热油泵,调节热交换器的热交换量,达到温度自动恒温控制。 这在技术实现上不同于现有技术,其实现了太阳能热利用的中低温段恒定控制,且恒温精确度高,填补了太阳能热利用中低温段恒温可控的空白,为太阳能的利用提供了一个新的市场。
作品简介: 本作品设计的内毒素专用超滤膜以及在线内毒素检测仪器,从根本上解决了超滤技术在注射剂生产中的热原去除难题,在线检测仪器实现了内毒素污染状况的实时监控,提高注射剂用药安全性。这两件发明的有机组合串联,达到了热原指标零风险生产的最高技术要求,使注射液生产过程体系能够保障内毒素含量达到免检的安全限量要求,确保注射液产品质量。

作品简介: 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。

作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

作品简介: 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。

作品简介: 该项目提出采用交流电动机定子结构(旋转磁场发生器)产生的旋转磁场使工件与磨具间产生非机械方式的相对运动,实现对不锈钢管内孔表面磁力粗、精加工的新思路。该结构既能实现工件与磨具间非机械方式的相对运动,又能对磁感应强度大小实现调整,并克服了其它方法产生的旋转磁场的漏磁现象、圆周性不好等缺陷,为套筒类零件的内孔表面、尤其是对由于本身的特殊性不宜做高速旋转运动的零件提供了一种行之有效的加工方法。

作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 针对驻岛部队小分队在平时训练和野战条件下的淡水保障难题,该项目通过合理设计工艺流程、各部件结构及尺寸,研制了具有布局合理、结构紧凑、体积小、质量轻、携带方便、机动性强、淡化水量大、一人手动操作等特点的轻便型海水淡化装置。

作品简介: 鉴于目前国内外扩眼器存在的服务费用高、扩眼效率低和工作安全性差等方面的不足,本文研制了一种安全性和可靠性较高的新型液压式随钻扩眼器。该扩眼器具有性能稳定,作业范围广和经济效益高等特点。其独特的设计弥补了传统扩眼器工具存在的缺陷,打破了国外的技术垄断。经过地面测试和海上试验井的应用检测,该扩眼器各项指标均达到了设计要求,扩眼效果良好,能满足我国陆地和海上油气田扩眼作业要求,具有较强的市场竞争力。
