














搜索

作品简介: 现有的公文流转系统,在公文签章时没有将印章图片和数字签名相融合,安全性上存在不足。本系统采用ActiveX技术将数字签名技术与印章图片融合为一体,提高系统的抗攻击能力。系统采用USBKey技术来实现身份认证、数字签名,保证公文在流转过程的完整性、操作的不可否认性,对于实现真正意义的无纸化办公,具有重要的意义。另外,在公文流转流程设计上,本系统采用自定义模板设计技术,提高公文流转的灵活性。

作品简介: 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。

作品简介: 基于手工折纸产生的灵感,利用表现形式清晰的初等周期函数作为密钥来控制生成原图像的全排列置换模版,提出一种新的数字图像加密算法并制作了应用软件。该加密算法将周期函数的规律性和图像自身的二维矩阵特性相结合,将图像自身的特点纳入加密步骤中,是一种自适应加密算法。通过仿真测试,各项性能指标均达到或超过行业公认标准,表明该算法对图像信息加解密具有良好的效果。

作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

作品简介: 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。

作品简介: 本套系统以物联网技术为基础,以基于Zigbee协议的CC2530芯片为控制核心和无线传输模块,采用水流发电机作为系统的供电单元,替代了现有的电池或电源供电方式,将暖气中水的动能利用起来,实现了自供电技术。并且,通过物联网技术,将入水管、出水管的单个供暖单元和整个供暖系统组成网络,通过无线的方式对出入水管进行温度测量,在解决了明线测量问题的同时,大大提高了系统的可靠性和安全性。

作品简介: 该项目提出采用交流电动机定子结构(旋转磁场发生器)产生的旋转磁场使工件与磨具间产生非机械方式的相对运动,实现对不锈钢管内孔表面磁力粗、精加工的新思路。该结构既能实现工件与磨具间非机械方式的相对运动,又能对磁感应强度大小实现调整,并克服了其它方法产生的旋转磁场的漏磁现象、圆周性不好等缺陷,为套筒类零件的内孔表面、尤其是对由于本身的特殊性不宜做高速旋转运动的零件提供了一种行之有效的加工方法。

作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 针对驻岛部队小分队在平时训练和野战条件下的淡水保障难题,该项目通过合理设计工艺流程、各部件结构及尺寸,研制了具有布局合理、结构紧凑、体积小、质量轻、携带方便、机动性强、淡化水量大、一人手动操作等特点的轻便型海水淡化装置。

作品简介: 利用陶瓷行业常见的高岭土、铝矾土、滑石等廉价的天然矿物原料或工业尾矿制备高性能陶瓷微滤膜,这些原料价格低廉、储量丰富,便于在大规模工业生产上就地或就近取材,据初步计算最终可降低制备成本30%以上(较市场上常见的Al2O3、ZrO2等陶瓷膜)。同时通过采用挤压成型法、浸渍提拉法制备的堇青石质陶瓷微滤膜具有热膨胀系数小、抗热震性强等优点,并适用于强碱等苛性介质分离,其性能卓越,达到国际先进水平。

作品简介: 鉴于目前国内外扩眼器存在的服务费用高、扩眼效率低和工作安全性差等方面的不足,本文研制了一种安全性和可靠性较高的新型液压式随钻扩眼器。该扩眼器具有性能稳定,作业范围广和经济效益高等特点。其独特的设计弥补了传统扩眼器工具存在的缺陷,打破了国外的技术垄断。经过地面测试和海上试验井的应用检测,该扩眼器各项指标均达到了设计要求,扩眼效果良好,能满足我国陆地和海上油气田扩眼作业要求,具有较强的市场竞争力。
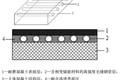
作品简介: 本课题通过引入梯度功能设计方法和相变储能材料进行水泥混凝土路面结构及材料设计 ,通过分层浇注、界面处理等技术,制备出新型水泥混凝土路面结构形式,确定主要材料配比,突出路面诸多优异功能。该路面结构的设计和制备对当前混凝土路面材料的发展具有较好的推动作用,同时利用相变储能材料进行防冻设计,具有节能、环保等诸多优点,符合我国公路交通技术的发展新方向。

作品简介: 本作品针对智能电网双向的电力潮流和数字信息流,研发了一种实时测量双向通信智能电表。 1、储存刷新模块为智能电网高效节能管理,实时提供带时标的电量信息;2、双向交互式通信模块,可接收调控信息及浮动电价,发送电量及异常故障信息;3、双向电量计量软件,通过软件判断功率因数,成功地集成用户侧的分布式新能源;4、通过发送检测到的故障信息,电力公司可快速定位诊断电网故障点。

作品简介: 本发明涉及一种自清洁玻璃制备新方法。首先以TiCl4为原料采用常温络合-控制水解新工艺制备出粒度为1.5 nm的混晶TiO2无色透明水溶胶,然后将该水溶胶利用普通高压喷枪均匀喷涂在玻璃表面,即可得到透明、均匀、牢固的薄膜,同时具有超亲水性和高自洁性能。与目前市场上采用的气相沉积、磁控溅射和溶胶-凝胶法相比,工艺简单、不用专门复杂设备、投资少、效果好,极大降低了应用门槛,前景广阔。

作品简介: 轮履两用救援灭火小车,用于现场有毒、易燃、易爆、高温、高辐射等工业危险环境。 电力驱动,节能环保;轮履两用,全地形通过能力强;网络化智能控制,灭火效率高,克服了现有设备机身沉重、机动能力差、适应环境差等弱点。针对不同的灾难特点及救援要求,依托该小车底盘装备不同的设备可执行多种救援任务。

作品简介: 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。

作品简介: 本作品发明了非有效接地配电网智能消弧与接地保护方法,在配电网瞬时性接地故障时,实现瞬时故障100%消弧,从而彻底消除由瞬时性故障引起的停电事故;在永久接地故障时,改变注入电流,检测并断开故障线路,实现接地保护,将接地保护可靠性由原来的20%提高到70%。作品已在全国应用,彻底解决了国内外长期存在的配电网接地故障消弧与保护难题,居国际领先水平。

作品简介: Danaus系统通过对热点问题和重点领域比较集中的网页、论坛、博客等各类信息,进行24小时监控汇集、分类、整合、筛选等,使政府即时地了解社情民意,使企业更好地了解受众对其产品、服务、综合竞争实力以及公司形象、声誉的评价和认知情况。
作品简介: 该作品采用改进希尔伯特黄变换处理地震信号,具有很好的时频分辨能力,有助于对原始剖面中的细微构造特征或岩性界面进行较好的分辨和验证;同时由于地震数据量的庞大,运用GPU的并行处理机制对海量地震数据进行加速处理和显示,大大提高了地震勘探的效率,是一套全新的地震数据处理软件。

作品简介: 本研究利用低品位的农业废弃物玉米芯为原料,开发低成本、高效的厌氧发酵工艺制备生物燃料丁醇。通过代谢进化技术选育出具有高丁醇耐受性、高糖利用率、高丁醇产率的菌株;并对其进行发酵分离耦合的研究;将pH两阶段调控手段应用于丁醇合成体系,实现其高收率低成本的制备。该研究实现了丁醇绿色制造的理念,具有重要的理论与实际应用价值。
