














搜索

作品简介: 本作品实现的是一种通过手势控制四旋翼飞行机器人的方法,相比传统飞行器控制方式更为简单直观,可进行较复杂的控制。系统通过深度摄像机捕获操纵者的手的深度图像,经计算机分析处理后得到手势信息并生成与之对应的控制信号通过无线通信装置发送给飞行器执行,以此实现从操纵者手的运动状态到四旋翼飞行机器人的运动状态的映射,完成移动和抓取的任务。

作品简介: 本次研究是设计具有GPS、GSM、环境指标等功能模块的控制系统,并应用低功耗MSP430单片机作为主控CPU,通过特定算法编码,监测控制货物包装运输过程,并确定运输过程中的货物移动位置、速度、环境温度变化、湿度变化等相关指标,完成货物运输的监控功能,确保物品运输流通安全。

作品简介: 智能象棋机器人以ARM11为控制核心,由棋盘及棋子、机械手臂(硬件)、博弈分析系统(ARM11控制系统)、机械臂控制系统(AVR单片机控制系统)等部分组成。机器人通过摄像头实时捕捉棋子的位置变动,得到对手的出招,然后输入到象棋算法中得到应招,之后通过AVR单片机控制数字舵机来完成棋子的定位和吸放动作,从而实现了真正意义上的人机对弈。

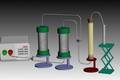
作品简介: 现代高热流器件表面热流密度已超过了106 W/m2的水平,采用被动式冷却方法无法满足散热要求,制冷技术可增大换热温差满足散热要求。许多场合受空间的限制,迫切需要轻量、小型的制冷系统。本设计利用滚动转子压缩机,结合采用强化传热技术的板式蒸发器、翅片管式冷凝器、热力膨胀阀等装置组成了重量轻、结构紧凑的微型制冷系统样机。同时验证了微冷样机的可靠性。本设计一定程度上满足了市场高热流电子器件的散热要求。

作品简介: 脉诊是中医文化中深奥、绚烂的组成部分,对脉搏的诊断是获取病人状况信息的一种重要途径,但是传统中医脉诊过于依赖医师的主观评价,缺乏客观的定量标准。 便携式脉象仪通过合理的方法设计,采用现代科学技术,结合传统的中医知识,实现了脉搏信号的自动采样与科学分析,建立起客观诊断标准,实现诊断病情的目的,即传承、发扬了传统的中医文化,又弥补了古老脉诊方式的不便与不足。
作品简介: 本作品采用等离子体辅助原子层沉积技术(PA-ALD)在聚酯(PET)表面制备Al2O3纳米无机涂层,并对其沉积机理及沉积薄膜阻隔性能进行相关研究。

作品简介: 本作品是基于Java语言编写的轻量级桌面应用软件,能够实现BPMN中包括基本元素的单泳道流程到BPEL的完美转换,转换后的文件符合OMG和OASIS组织制定的最新相关标准。实现了工作流中特定业务流程的图形化建模(BPMN)过程和在引擎中执行(BPEL)过程的良好衔接,达到流程从业务建模人员到编程人员高效过渡的目的,进而有效促进了办公自动化的发展。

作品简介: 为了实现基于蓝牙通信的物联网,我们完成了蓝牙物联最小系统(BMIS)的制作,并成功使用它控制家用电器等物联网终端。而且还开发了相应的软件,更加提高了蓝牙物联最小系统的可用性。
作品简介: 本发明设计的主要目的在于提供一种油膜驱替特性模拟装置及系统,以解决现有技术中的油膜驱替特性评价装置无法真实准确的量化评价多孔介质中油膜驱替特性的问题。本装置及系统适用于石油与天然气开发及提高采收率过程中使用的气体和化学剂在多孔介质驱替过程中对油膜的驱替特性的评价。可以模拟不同大小的孔隙介质中油膜的驱替特性,也可以模拟不同压力驱替条件下油膜的驱替特性。

作品简介: 本项目利用红外传感器和激光传感器完成输液滴速和液面高度的采集,再经无线传输模块传输到PC终端的监控界面,并控制前端步进电机自动调节输液速度。在此过程中,数据的采集、传输与控制模块均由单片机实现。而且人性化的终端监控界面可显示病人的多项信息。
作品简介: 一款用于高楼发生火灾等意外情况时逃生用的装置,也可以用于高空作业。

作品简介: 本项目集成计算机视觉技术、计算机图形学、虚拟现实技术,结合Qt图形用户界面应用程序框架、OpenCV计算机视觉库 、OGRE3D图形渲染引擎以及ODE物理引擎,设计了一款名为“三维交互式电子黑板”的教学软件。该软件可以实现多种教学模型以及物理运动规律的三维模拟,还可以对教师的特定手势进行识别,进而分析教师意图来对模型进行平移、旋转、缩放等操作,以此达到人机交互的目的,提高课堂的生动性和趣味性。

作品简介: 双雪花机器人是通过改变自身形状,由重力作为向前翻转的动力源带动机构前进。电机起的作用是改变机构外形,该机构是多边形结构,通过电机的往复正反转可以改变机构重心位置,然后由重力做功向前翻转。这种设计概念非常适用于复杂地形的运动,此时克服自身重力比克服地形阻力要相对轻松一些。 在控制上,应用可以带动两个直流电机的L298N芯片来实现电机正反转的控制功能。

作品简介: 本项目开发了一套海上钻井表层导管入泥深度计算软件,该软件系统可以快速、准确的计算表层导管最小入泥深度,降低海上施工的盲目性,增加施工安全,节约钻井成本。
作品简介: 纳米重金属原子受可见光激发产生等离子共振效应,将其掺杂于纳米半导体颗粒中可使传统半导体发光能带重组,且控制掺杂金属原子团尺寸的改变可以使带隙发光位置明显红移,体现出光致红外发射特性。本实验用液相还原法制备纳米铜原子团,并用共沉淀法将纳米硫化镉包覆在其表面,最后均匀镶嵌在聚乙烯醇薄膜内形成光激发红外发射涂层。可将其应用于影院屏幕上,发出的红外线干扰摄像机成像,但不影响观众正常观看,达到防偷拍的目的。

作品简介: 该实验对原有的灌水器加以改进和加工,从而制造出新型的低压地下滴灌灌水器,并通过均匀性试验、压力—流量试验、土壤性能测试实验、土壤水分入渗实验对制成的新型灌水器进行性能调试与测定。试验结果表明:新型灌水器工作压力低、运行耗能少、抗堵塞性能强。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
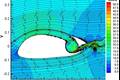
作品简介: 后置横流风扇升推力综合翼是一种将横流风扇融合进厚翼型后缘附近的上表面,利用风扇的吸附作用抑制气流分离并同时产生推力的新概念机翼。这种机翼创新性地将升力和推力紧密地联系起来,并且通过横流风扇进行机翼上表面的流动控制,达到增升的效果。在横流风扇的作用下,该机翼在较大迎角下不仅不会失速,反而能产生较高的升力和推力。另外,厚翼型的采用使得机翼的内部空间相对充裕,这在实际应用中具有很大的意义。

作品简介: 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。

作品简介: 近些年,各种流行病在世界各地大规模暴发,极大的影响了人类的健康。目前,各方仍没有提出很好的监控预防办法,本系统通过实时监测节点个体的体温和位置的变化,经综合分析后,实现对社区流行病的控制。经过参赛队员和指导老师经过反复研究和讨论,我们设想,将物联网和流行病监控结合起来,建立一个网络,研究用于流行控制的人员跟踪检测系统。
