集美大学专区
基本信息
- 作品名称:
- 6DOF船舶智能操纵模拟器
- 大类:
- 科技发明制作A类
- 小类:
- 信息技术
- 简介:
6DOF智能型船舶操纵模拟器包括以下几个基本组成:
仿真控制服务器;
智能目标船运算服务器;
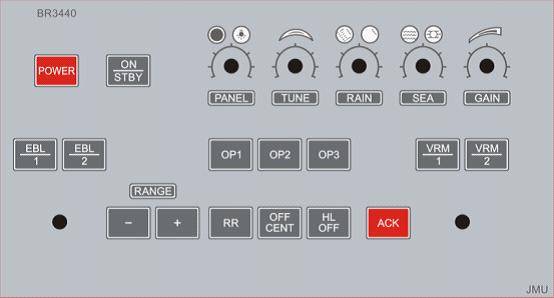
若干具有高精度、可编辑船模、可扩展的本船端。本船端包括电子海图、船模解算、模拟ARPA、三维视景、船舶控制、避碰决策自动教学演示和液压驱动等模块,可分为带液压平台的三维视景终端、普通三维视景终端和桌面终端。- 详细介绍:
目的:
为了实现模拟器中目标船不具备按照《规则》避让它船的能力,同时更加真实的模拟船舶航行环境包括动态环境和静态环境,从而达到全面训练学员的判断能力。基本思路:
针对传统船舶操纵模拟器的不足以及STCW公约马尼拉修正案对船舶操纵模拟器提出的更高需求的客观事实,本项目将虚拟现实技术、自动控制理论、信息处理技术、人工智能技术、决策技术以及分布式计算等高新技术与航海技术相结合,提出了将六自由度液压伺服平台、六自由度船模、自动避碰成果、AIS实时交通流等引进新型船舶操纵模拟器的研发中,自主研发了6DOF智能型船舶操纵模拟器。该模拟器实现了目标船能根据当时的船舶交通会遇态势按照《1972年国际海上避碰规则》
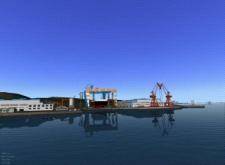
(以下简称“规则”)或者海员习惯做法进行智能航行,使得模拟航行态势与实际更加接近。除此之外,本项目还利用OpenScenceGraph技术(简称OSG)对船舶操纵模拟器视景系统进行三维驱动,增强了模拟器的视觉效果和仿真度,与同类产品相比,我们的视景系统具有引擎先进、模块清晰、效果逼真等优势。- 获奖情况:
第十二届“挑战杯”省赛作品 省赛三等奖
获得集美大学“挑战杯”课外学术作品竞赛三等奖