














基本信息
- 项目名称:
- 外骨骼机器人设计、控制机理研究
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。
- 详细介绍:
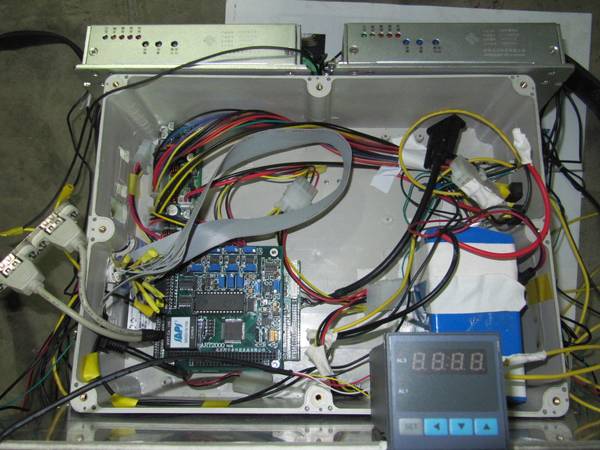
- 1、机械结构设计。本套外骨骼机器人机械结构完全有我们小组自行开发,大腿采用弧线型结构,以更好的同人体贴合。小腿部分设计有伸长轴结构,可以按照穿戴者的身高进行调节。背架上放有全套的电控系统控制箱。钢索滑轮的传动结构对电机的旋转运动进行了转换,实现了小腿在钢丝绳牵动下进行伸屈运动。整体机械结构总重量在6公斤左右。 2、 电气系统。电气系统分为4个部分,分别是:控制卡,数据采集卡,传动系统和反馈系统。 控制卡我们选用PC104板卡,搭载DOS和WINXP系统,配有ART2000数据采集卡,可以实现16路AD的数据采集和4路DA的数据发送。传动系统选用了直流电机,易于调速。反馈方面,由埋放在双脚鞋底的压力传感器和配合直流电机的角度传感器实现,从而达到实时的数据采集和步态的判断控制。 3、软件系统。在控制方面,我们采用阈值判断的方式。首先我们根据鞋底采集的压力数值,判断人体所处的姿态,是正常站立还是抬腿行走这两个阶段。如果是正常站立,电机不工作;如若是处在行走状态,系统再根据角度传感器的变化,判断人体是在收腿还是迈腿,进而决定电机所牵引钢丝绳的收放。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本作品设计的基本思路是通过外骨骼机器人特殊的机械结构承受人体重量及负重,通过电气部分驱动外骨骼大小腿的运动从而实现对人体运动的跟随,通过软件部分实现对数据的采集、对直流电动机运动速度和方向的控制以及对紧急情况的处理。 本作品的创新点在于: 1. 采用直流电机作为动力元件,同目前广泛使用的液压传动相比,在实现基本功能的基础上,大大降低了成本。 2. 电机的转动,通过滑轮和钢索的牵引结构,带动小腿的运动。对于钢索的选取,是由于其具有柔性传动的特性。避免了可能出现的刚性过度引起穿戴着运动不适的情况。 3. 基于人体仿生的原理,根据人体运动时的特征位置设计机械结构,实现了较为舒适的穿戴效果和力学性能,使负载重量通过机械腿传到地面,结构简单,整体重量较轻。 4. 为减少人体与外骨骼的接触,本项目使用了4个传感器以获得人体运动时的参数,相比于其他一些产品减少了传感器数量(如BLEEX具有40多个传感器),降低了复杂程度。 技术关键:仿人型外骨骼机械结构设计,旋转运动与直线运动之间的转换,角度传感器及力传感器合理安装,软件算法编程实现,电路合理布线。 主要技术指标:1、重量<=6公斤 2、电机输出扭矩2n.m 机械结构尺寸:小腿<=450克 跟随误差:最大弯曲时角度误差在4度以内。
科学性、先进性
- 本作品首先实现了机械结构对人体运动的跟随,经过理论计算和实际检验,具备一定的输出扭矩,通过设计的程序控制电机转速使之能跟随人体大小腿运动,具备辅助病人康复的功能。 在负重方面,主要通过人体大小腿直立输出较小的力维持机械腿直立状态,负重通过直立的机械腿传到地面,实现了人体用很小的力承受较大的负重。这种设计思路和之前出现过的产品相比,结构简单,成本降低,可靠性高。结构总体设计上,外骨骼和人体贴合合理,传感器数目少,对人体本身的运动限制很小,人体基本上能够无阻碍地行走。传动方式上,由于传动采用的是滑轮结构,是一种柔性连接,也减小了刚性冲击,穿戴舒适性较好。另外采取了一些保障措施,紧急情况下能够急停,安全可靠。
获奖情况及鉴定结果
- 于2011年4月-5月期间,参加北京航空航天大学第21届“冯如杯”学生学术科技作品竞赛,并荣获校级一等奖。
作品所处阶段
- 机械定型生产,电气调试完毕,实现外骨骼随动行走和牵引行走两项功能。
技术转让方式
- 待查
作品可展示的形式
- 脱离工控机,实现独立的外骨骼穿戴,进行人体随动行走和牵引行走演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本套外骨骼机器人,仅需通过套小腿的绷带和肩部背带同人体连接,即可实现机械的穿戴。单人即可完成,较为方便。设计对象主要针对于医疗康复训练和负重行走两项基本功能。 机械系统中,本套外骨骼机器人整体质量在6公斤左右,穿戴容易。传动方面,直流电机控制简单,调速灵敏,并可更具不同的需求改变电机型号的选取,从而实现大扭矩的输出。传动方式以钢索牵引的形式,实现了柔性连接,相比于液压传动方式成本低廉,同时也避免刚性过强引起的运动者穿戴的不适和行走时的干涉。 电气系统中,采用的PC104控制卡性能稳定,10Ah的锂电池为PC104板卡和电机供电,持续工作时间在2小时左右。 目前该成品处于实验室完善阶段,作为国际上热点研制项目之一,外骨骼机器人也被列入了我国重点实验项目。其针对对象主要为军队系统内单兵使用,具有一定的开发潜质和使用价值。
同类课题研究水平概述
- 目前在国际上,已有诸多成型的外骨骼机器人问世,但总体讲,自1966年的哈德曼助力机器人的研发设想的提出到今天的发展程度,还是处于研发阶段,距离实际应用还是具有一定的差距。对于同类课题研究水平,参考如下: 1、美军事合作项目,代表助力外骨骼机器人最新水平的Raytheon Sarcos XOS机动外骨骼。“XOS”外骨骼是为了创造出超人的士兵,由美国国防部高等研究计划局(DARPA)提供了1000万美元的军事研究预算,经过7年秘密研发出来的,代表了机械外骨骼领域最尖端的技术。它的控制思想同早期的BLEEX一样,控制系统通过检测系统和微机系统判断人的下个动作,从而决定加给人体多大的助力及速度,并且也是通过液压系统将力传给外骨骼机构,但它是全身武装的外骨骼,而BLEEX是下肢外骨骼机器人。“XOS”动作较从前的外骨骼设备动作要敏捷的多并且强有力。利用附在身体上的传感器,可以毫不延迟地反应身体的动作,输出强大的力量。当穿上“XOS”时,能举起90.7kg的重物而人体感觉只有9千克,能连续举50-500次。但目前“XOS”收到能源能量密度的影响,其自带的电池只能使用40分钟,大大限制了投入实际使用的可能。 2、以色列“ReWalk”外骨骼机器人。其通过一副拐杖帮助维持身体平衡,由电动腿部支架、身体感应器和一个背包组成,背包内有一个计算机控制盒以及可再充电的蓄电池。使用者可以用遥控腰带选定某种设置,如站、坐、走、爬等,然后向前倾,激活身体感应器,使机械腿处于运动之中。动力传动采用电机-减速器-外骨骼机构的方法,运动模式主要是装置带动人体动作。 “ReWalk”外骨骼机器人主要目的是用来助瘫痪者恢复行走能力。但其装置的助力大小由控制系统设定,不能跟随人的动作意愿而随时改变。 3、由日本筑波大学研发的“HAL3”(Habrid Assist Legs)外骨骼机器,其功能是帮助人完成行走、起立、坐下等下肢动作。“HAL3”机器人主要由无线LAN系统、电池组、电机及减速器、传感器(地板反应力传感器、表面肌电传感器、角度传感器)、执行机构组成,总重约17千克,设备较重.动力传动采用电机-减速器-外骨骼机构的方法。能够根据人体的动作意愿自动调整装置的助力大小。其市场规划将主要面向高龄护理、残疾人辅助、消防及警察等危险作业的用途。








