














基本信息
- 项目名称:
- 凸轮驱动控制式四足机器人的系统设计
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
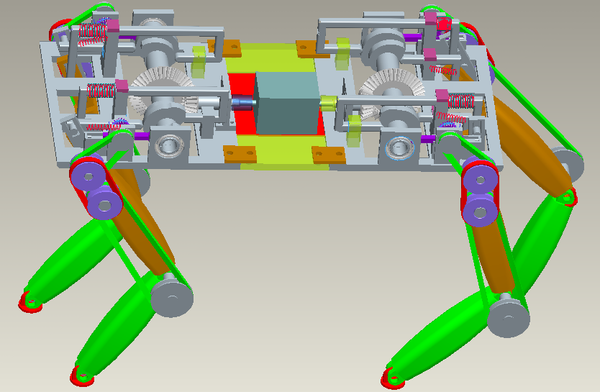
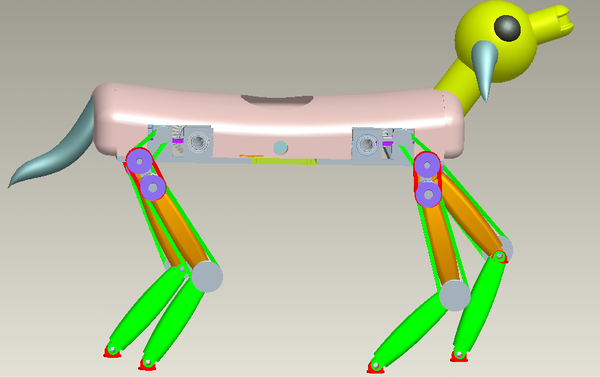
- 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。
- 详细介绍:
- 本四足行走机器人的双轴电动机在单片机控制状态下,能够实现不同速度的转动,以及不同方向的转动,能很好的模拟动物在不同速度下的运动情况。电机两头带动两个锥齿轮旋转,通过与这两个锥齿轮相啮合的锥齿轮,将运动方向旋转90度,改变了传动方向,同时将动力传到了下一传动轴上,进而保持了运动的延续,该两侧的传动轴上各有6个凸轮,总计12个,这是本四足模拟动物的最核心部件,主要通过这12个凸轮将运动形式传递到四足行走机器人的髋关节,膝关节上,进而通过凸轮的协调运动,实现四足行走机器人的协调运动,达到实验目的。其中包括住凸轮调节,髋关节调节,膝关节调节,三中调节互不影响,但是协同工作,这三种调节都是通过弹簧复位实现凸轮推杆的往复运动,进而带动与凸轮推杆相连动的髋关节,大腿,小腿的运动。这里主要介绍膝关节调节,膝关节凸轮通过推动齿条(推杆)运动,进而带动与齿条相啮合的齿轮运动,继而通过与齿轮刚性相连的带轮,带动带轮,再通过带轮3级带动,将运动形式传递给膝关节,从而调节小腿的运动,大腿主要通过髋关节调节运动,主凸轮调节大腿与身体之间部分的协调运动。同时为了减轻四足行走机器人身体的重量,本实验项目对四足行走机器人的主要零部件,以及辅助零部件进行了结构上的优化;同时为了保持四足行走机器人运动的平衡,对四足行走机器人身体进行了保持狗身平衡运动的优化尝试,尽最大可能的保持四足行走机器人平衡运动。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的: 仿生机器人是目前国际上研究的热点,四足机器人作为仿生机器人的一种重要形式,得到了广泛的研究与关注。目前,四足机器人的研究侧重于在四足机器人的关节处安装伺服电机,采用复杂的控制算法,控制机器人的步态与行走轨迹。然而,伺服电机的采用致使机器人的本体机构重量增加,成本增加,控制策略复杂。因此,对于简单的机器人步行,引入凸轮驱动控制方式,代替驱动电机,无疑具有较大的理论意义与工程实践意义。 基本思路: 1.以狗为例分析四足动物的步态规律,为机构设计提供依据; 2.提出适当假设,简化步态公式,进行步态建模; 3.根据步态建模,分析腿机构的行走机理并建模,确定行走轨迹; 4.根据腿机构的行走机理,反推驱动凸轮轮廓,并建立行走机构模型; 5.采用三维建模软件Pro/E和动力学仿真软件Adams进行虚拟样机建模与分析; 6.加工机械零部件,对于凸轮轴采用快速成型等先进的加工方式; 7.装配样机,并设计相应的控制系统; 8.样机实验与改进。 创新点: (1)提出一种凸轮驱动控制式四足机器人行走机构; (2)提出一种四足机器人的腿机构模型; 技术关键: (1)四足动物的步态规律与行走轨迹约简; (2)四足机器人腿机构机理分析与建模; (3)凸轮型线建模与分析; (4)物理样机研制。 主要技术指标: 重量:5.2Kg;外形尺寸:(长宽高)50cm×25cm×50cm;步距:20cm;步行速度:可变;最大离地高度:50mm;负载:无。
科学性、先进性
- 本项目引入凸轮驱动控制方式,代替传动驱动电机,来驱动四足机器人行走,具有较大先进性。项目组发表中文核心期刊论文3篇,《四足机器人机械系统虚拟设计及转弯机构理论分析》,《基于凸轮控制驱动式的四足机器人行走机构设计与理论分析》,《凸轮控制驱动式四足机器人控制系统设计》。 电气控制即利用伺服电机作为执行装置,由控制器按照控制函数对应的控制算法,产生控制信号。目前,很多四足机器人的研究主要侧重于在四足机器人的关节处安装伺服电机,采用非常复杂的控制算法,控制机器人的步态与行走轨迹。然而,伺服电机的采用致使机器人的本体机构重量增加,成本增加,控制策略复杂。在本课题中,由于每条腿有三个参数需要控制,四条腿就有12个参数要控制,即若选择伺服电机作为执行装置,就需要安装12部伺服电机,再加上与这些电机匹配的减速器,电气控制的重量轻、体积小的特点就显示不出来了。针对上述问题,对于简单的机器人步行,引入凸轮驱动控制方式,代替驱动电机。
获奖情况及鉴定结果
- 2010年10月获得全国三维数字化创新设计大赛山东赛区一等奖。
作品所处阶段
- 实验室阶段
技术转让方式
- 技术未转让
作品可展示的形式
- 模型,图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该设计可以用一个电机通过四套凸轮机构,对四足行走机器人运动进行驱动,克服了用多个电机分别控制前后足行走的而造成四足不能完全协调驱动。同时,该设计与传统设计相比,可以减小四足行走机器人自身的重量,为运动设计提供很大便利。也可以为以后该设计在实际应用中材料的选取提供了一定的可选性。随着经济生活的提高,现在人越来越需要由机器人来替人完成一定的工作。四足行走机器人可以在生活中帮助人们完成许多繁琐的工作,节约大量的时间,提高工作效率。在未来10~20年之内,四足行走机器人将会广泛应用到人们的生活、学习和工作等各个领域,成为人们不可或缺的工具。
同类课题研究水平概述
- 足式机器人是近年来机器人研究的一个比较活跃的领域,其涉及学科主要有机器人学、生物学、控制理论、传感器技术、信息处理技术等。因其运动方式不同于传统的轮式、履带式机器人的运动特点,并克服上述两种机构在崎岖路面运动过程的种种缺点,如平稳性、通过性和机动性等,所以得到了各国科学家的大力关注。其中四足机器人因其机构和控制方法相对简单故成为足式机器人的一种理想研究对象。 自20世纪80年代机器人学的开拓者、美国著名机器人学专家R.B.McGhee等开始研究四足步行机器人以来,步行机器人的研究一直是众多学者关注的热点和难点。 1.国外研究现状 (1)1994年,日本电气通信大学的木村浩等研制成功四足机器人Patrush-II。从2000~2003年,日本人木村浩等又研制成功四足步行机器人Tekken。 (2)从20世纪80年代开始,日本东京工业大学的濑茂男等进行实验,进行四足机器人研究。所在实验课题组持续研究20多年,共试制成功3个系列,12款四足机器人。 (3)美国的MIT,卡耐基梅隆大学,加拿大,德国,法国,新加坡,韩国等国家均有四足机器人样机研制成功。 2.国内研究现状 (1)吉林工业大学从20世纪70年代开始,由陈秉聪教授和庄继德教授分别带领的两个研究小组,开始进行非常规行走机构的研究。 (2)1985年,陆怀民博士研制出一台具有两条平行四边形腿的步行机耕船试验台车,在土槽试验中表现出较高的牵引效率,主要用于无硬底层的水田耕作。 (3)1989年,北京航空航天大学在张启先教授的指导下,孙汉旭博士进行了刚性足步行机的研究,试制成功了一台四足步行机,并进行了步行实验。 (4)清华大学机器人及智能自动化实验室正在研制QW-1四足全方位步行机器人。 (5)1991年,上海交通大学马培荪等研制出JTUWM系列四足步行机器人。








