














基本信息
- 项目名称:
- 重型车辆六连杆多级耦合全轮转向系统
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品是对多轴重型车辆转向控制领域一种全新的探索,应用Watt-II型六连杆多级耦合机构组成多轴转向系统,使重型车辆在满足阿克曼转向原理情况下实现全轮同时转向,增强了多轴重型车辆的机动性、小场地转向灵活性与操作稳定性。并将多级六连杆全轮转向系统与全轮驱动、独立悬挂技术良好结合,实现了多轴车辆集全轮驱动、全轮转向、独立避震于一身的发展趋势。
- 详细介绍:
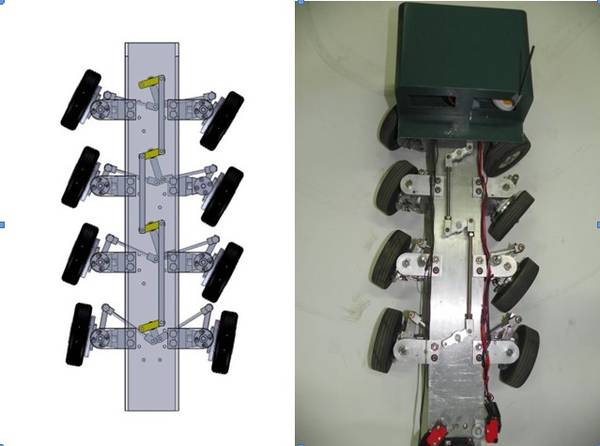
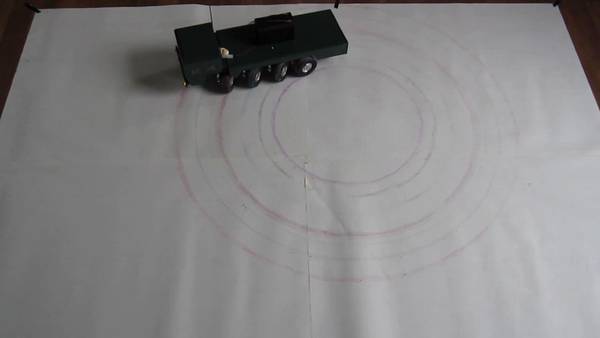
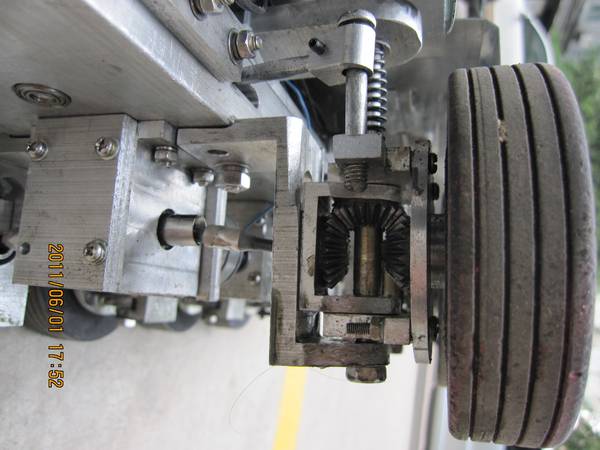
- 本作品是对多轴重型车辆转向控制领域一种全新的探索,应用Watt-II型六连杆多级耦合机构组成全轮转向系统,使重型车辆在满足阿克曼转向原理情况下实现多轴同时转向,增强重型车辆的机动性,小场地转向灵活性与操作稳定性。 结合重型车辆实际底盘结构确定Watt-II型六连杆转向机构在重型车辆转向系统中的应用。通过理论计算与三维建模得出六连杆机构尺寸。并利用台架实验和虚拟样机进行数据验证与尺寸优化。整车结构设计是样车制作的重点与关键步骤,在设计中,考虑到六连杆机构及传动系统对样车的特殊要求,自行设计、制作了与之匹配的独立悬挂机构、摩擦式差速器用于车轮大角度转向并驱动的空间差动式轮边传动机构。通过自主加工、装配和调试,成功完成单驱多轴转向样车以及全驱全轮转向样车各一辆。通过两辆样车的阿克曼原理转向试验、越障试验、载重试验以及转向灵活性试验,充分体现了六连杆转向系统的突出优势,验证了其应用于重型多轴车辆上的可行性,也证明了本作品设计制作的正确性。 鉴于车辆转向灵活性和稳定性的优点,该种多轴转向系统可广泛应用于军用大型物资、武器装备的快速转运,码头、大型仓库等小场地环境下物资的灵活转运。因此,本作品对于研发多轴重型车辆新型转向控制技术具有深远意义,特别是对其国产化自主设计、生产将起到促进作用。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的和基本思路:目前国内对重型车辆全轮转向技术的研究基本上停留在理论分析、仿真研究阶段,通过本作品可以验证理论设计的正确性,为进一步的深入研究提供指导。首先采用优化设计方法完成转向系统尺寸设计,参照现有车辆底盘结构进行全轮转向车辆底盘设计,通过虚拟设计筛选并确定可行方案,最终进行样车制作和调试、试验。 创新点: 1.采用Watt-II型六连杆多级耦合机构实现全轮同时转向,相比于传统梯形转向机构,有效缩小了整车的转弯半径,提高了车辆在转弯时的稳定性。对于多轴重型车辆转向方面是一个质的飞跃,它大大的增加了车辆的灵活性。 2. 自行研制应用于车辆大角度转向的空间差动式轮边传动机构。 3. 自主研制摩擦式差速器,在样车上进行了应用,满足使用要求。 4.采用独立悬挂避震系统,使得车辆在行驶中更加稳定,增强了车辆对各种路面的适应性。 5. 自主设计、加工整车模型,并通过实验验证Watt-II型六连杆多级耦合机构在实际工作过程中的可行性,为理论的推导做出实验上的验证。 技术关键包括:多轮转向机构尺寸设计及安装结构设计、多轮转向车辆底盘结构设计,实物模型的转向控制系统设计,全驱全转车辆底盘结构设计及控制方式设计。 主要的技术指标包括:等比例缩小样车灵活转向、样车多模式转向、样车在转向过程中满足阿克曼转向几何学原理;样车实现全轮转向、全轮驱动、独立避震性能。
科学性、先进性
- 由于重型车辆质量大、惯性矩大、质心高,轴数多,故其行驶性受到多方限制。全轮转向和多轴动态转向技术在提高重型车辆高速操纵稳定性和低速机动灵活性具有显著的功效。但多轴转向技术在国内外都属于前沿科技,国外的一些大型的载重车辆厂如利勃海尔(LIEBHERR)对技术的保密十分重视。同时重型车辆多轴转向技术多与军工有关,国外对我国重型车辆多轴转向技术处于封锁状态,因此可见的系统性的研究报道很少,本作品有可能解除这一封锁。 随着工业的迅速发展,转向机构的结构形式也不在单一。现在已有的结构有很多种,其中常见的有以下三种:转向梯形机构、Watt-II型六连杆转向机构、FEMM转向机构。其中转向梯形机构出现得较早,而且技术也比较成熟。另外两种结构实际应用还不是很成熟,但是他们的转向性能更好。在多轴转向机构中,串联Watt-II型六连杆机构又称为中心臂转向机构,具有对称性、工作可靠性和制造成本低等优点。
获奖情况及鉴定结果
- 2010年12月,在校第十九届大学生课外学术科技作品竞赛中,获“特等奖”。 2011年6月,在第八届西安高新”挑战杯“陕西省大学生课外学术科技作品竞赛中,获“特等奖”。
作品所处阶段
- 实验室阶段
技术转让方式
- 有偿技术转让
作品可展示的形式
- 样品 图片 录像 现场演示 图纸
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明及技术特点优势:采用优化设计方法完成转向系统尺寸设计,参照现有车辆底盘结构进行多轮转向车辆底盘设计,通过虚拟设计筛选并确定可行方案,最终进行样车制作和调试。首先制作等比例缩小的多轮重载车辆物理样机,进行试验分析研究;然后根据试验数据提出转向控制策略;进行等比例缩小实物模型的转向系统的结构设计以及转向控制系统设计从而完成作品,作品通过控制系统的控制能够实现等比例缩小样车的灵活转向、样车多模式转向、样车在转向过程中满足阿克曼转向几何学原理。 适用范围及推广前景:作品设计的多轴重型车辆转向控制系统可为重型车辆现有转向系统设计进行改进提供设计指导和参考依据,可应用于军用多轮重载车辆以及多轴重型车辆的转向控制系统设计,同时还可为多轴挂车的转向控制系统设计提供设计指导和参考依据。作品具有良好的使用范围和推广前景,多轴转向技术的研究与推广可以增加我国重型车辆在国内与国际市场的市场竞争力,同时带来可观的经济效益。
同类课题研究水平概述
- 目前,国内高校研究机构对于多轴转向系统的设计分析方法主要可以分为两大类,其一:利用优化设计,目标函数取为实际转向机构特性和阿克曼理论特性的差值最小,设计整个转向系统的结构尺寸;在上述设计过程中,选取的转向机构可分为两大类,即:转向梯形机构和Watt-II型六连杆转向机构;纵向耦合机构采用连杆机构综合完成各个转向轴之间的组合;部分研究中还考虑到应该使优化的结果在比较频繁使用的转角范围内的偏差尽可能的小,而那些不经常使用的角度范围内可以适当地放宽要求,因此引入加权函数。其二:建立重型车辆多轴转向的二自由度模型或更为复杂的模型和运动微分方程,以研究分析各种控制方法为手段来提高重型车辆的操作稳定性;由于整个多轴转向系统的复杂性,影响因素多,在分析过程中车辆的运动学模型一般都采用二自由度模型。在研究过程中采用的控制策略有:“比例前馈”、“比例前馈+横摆角速度反馈”、 “方向盘比例前馈”、“零侧偏角控制策略”、“模糊PID控制”等。 同时,国内重型车辆生产企业中,徐州重型机械有限公司推出了多轴转向重型设备,例如:其生产的QY130K型汽车起重机,发展势头非常好,但是还不能实现全轮转向。其他一些重型车辆厂,如中国重汽,陕汽集团等推出的重型车辆并未使用多轴转向技术。 重型车辆多轴转向技术,国外对我国一直处于封锁状态,可见的系统的研究报道很少。德国的索埃勒(SCHEUERLE)特种车辆公司是一家百年老厂,其生产的“自行式平板挂车”由于转向拉杆布置在平板上方,可迅速便捷组成不同的组合形式,大幅度降低劳动强度和节省宝贵的时间,大大地增加了车辆投入使用时间,给企业带来意想不到的经济效益;高达60°的转向角,通过补充转向机构,便可提高转向角度,车辆使用寿命长,驾驶简单,使用场合不受条件限制,在世界物流行业得到广泛使用,深受广大用户欢迎。意大利的科米托(Cometto)挂车公司、德国的歌德浩夫(GOLDHOFER)和史密兹(SCHMITZ)公司等近年来对组合中心臂转向机构(Watt-II型六连杆机构)进行了大量研究,并己经形成了系列化的定型产品,但是其设计原理及结构都属于商业机密,没有申请专利。此外沃尔沃、格鲁夫以及利勃海尔(LIEBHERR)等公司也推出了多轴转向重型车辆,例如:利勃海尔(LIEBHERR)生产的型号为T7的汽车起重机。








