基本信息
- 项目名称:
- 基于3G网络的轮式移动机器人无线视频监控系统
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
- 本项目开发一款以无线网络为传播媒介的轮式移动监控机器人。在机器人上搭载摄像头采集视频信息,利用开发的上位机主控程序,通过无线网络,控制移动机器人,采集相关视频信息,同时,机器人上丰富的传感器能采集返回很多现场环境的信息,可用于移动监控或是震灾搜救等特殊工作中。
- 详细介绍:
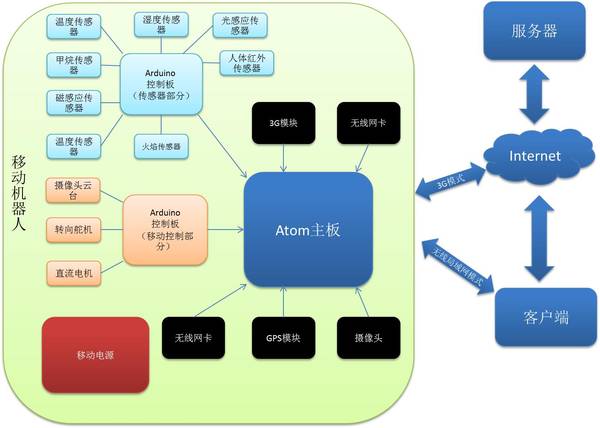
- 本作品主要由移动机器人、系统服务器端和系统客户端程序组成,主要实现移动控制、视频监控、现场的环境信息检测等多种功能。可用危险环境的信息采集、人员搜救和仓库监控等现场。移动机器人部分,主要搭载了Atom平台,包含了3G模块、无线网卡、摄像头和GPS模块,同时结合AVR单片机和一些传感器,对现场环境信息的采集。服务器程序主要用于转发移动机器人与客户端之间的信息,同时记录相关位置和操作信息。客户端主要包括两种客户端,一种为主控客户端,可用于对移动机器人进行控制和信息采集,并显示;另外一种是普通客户端,只能用于查看移动机器人传送回的视频、传感器信息和位置信息等。客户端上集成了google卫星地图,结合移动机器人的GPS模块可清楚的在地图上显示位置信息。移动机器人不仅具有一定的越障能力,其上搭载的10余种传感器,使得所采集的信息更为丰富。不仅如此,无线传输的模式主包括:3G模式和无线局域网模式用户可以使用客户端轻松的切换这两种数据传输的模式,使得可控制和监控的范围更广。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 主要解决的问题与创新点: 1.主控设备(PC机/3G智能手机)的控制软件开发,以及如何实现通过3G网络的远程控制问题。 主要解决移动机器人的控制软件开发,通过软件方便控制机器人移动,以及让操作人员直观的了解机器人传感器所采集的信息,更好的完成人机交互的效果。 2.3G网络下的视频传输,实现移动机器人控板ATOM与主控设备(PC机/3G智能手机)视频及其他信息通信问题。 主要解决通过3G网络的完成视频传输的问题,使机器人通过所采集的视频和其他信息能发送回主控设备进行处理显示,同时也使主控端所显示的视频信息清晰流畅。 3.移动机器人主控Atom平台与其舵机控制板和传感器控制板之间的数据通信协议问题。 主要解决移动机器人的移动控制问题,能使其按照主控端软件的控制信息完成移动功能。使用户能方便的控制机器人移动,更好的完成移动监控功能。 4.对移动机器人主控Atom平台的系统选型和控制软件开发,如何适应项目需求问题。 主要解决下位机的主控问题,以更好的实现以上三点的所用功能。在Atom平台上安装Windows Xp,有利于提升机器人的视频采集处理能力,使下位机控制更为一体化。 5.机器人的电源输出问题。 主要解决机器人的电源问题,除了要给AVR控制板(5V)供电外,还需要为电机(7.2 v)和伺服电机(5v)供电,由于电压不统一,因此以此完成电源问题的处理,才能使机器人工作正常。
科学性、先进性
- 本作品相比与现在市面上的无线监控系统,主要优势有如下几点: 1.移动监控,用户可自行控制移动机器人,到达指定位置,或者对指定目标进行监控,有很大的灵活性。 2.3G传输,移动机器人所采集视频和控制信息通过3G网络传输,只要有3G网络覆盖的地方,用户都可以随时随地方便的使用客户端对移动机器人进行控制,观察监控信息。 3.3G网络与局域网的自由切换。当移动机器人检测到可用的有效局域网时,会自动从3G网络切换到局域网,从而提高了监控视频信息的质量。 4.GPS实时定位。上位机控制软件会结合google地图,随时显示机器人的位置信息,方便用户控制。 5.智能手机控制。特别编写了手机端控制软件,3G手机也可以通过3G网络控制移动机器人,从而进行监控,这在家居监控方面是个和有意义的应用。
获奖情况及鉴定结果
- 1.本项目获2010年湖南省大学生研究性学习与创新性项目。 2.本项目获2010年湖南省大学生计算机作品大赛二等奖。 3.本项目获2009年湖南工业大学大学生计算机作品大赛一等奖。
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物展示,可演示实际功能
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等功能于一体的智能体,能按照预先给定的任务指令、根据已知的地图信息作出全局路径规划,并在进行中不断感知周围的局部环境信息,自主地作出各种决策,自动避开障碍物引导自身安全行驶到指定的位置,执行要求的动作和操作。移动机器人已在机械、电子、纺织、卷烟、医疗、造纸、食品等行业得到了广泛地应用,尤其是在高污染(核污染、化学污染)和恶劣(高温、高噪音)环境中发挥重要的作用,保障了工作人员的安全。 随着信息技术的发展,无线通信逐渐深入到办公室、矿山、港口、仓库等场所,由于它使人们摆脱了有线线缆的束缚,可以在任何地方、任何时刻访问网络资源或实现无线网络设备之间的互联。近年来,在移动机器人的研究领域方面,基于无线通信方式控制移动机器人方面有着巨大的潜力和应用。
同类课题研究水平概述
- 1、国外研究现状 国外该方面的技术遥遥领先,特别是美国和日本出于顶尖水平。 1993年,美国发声韦科庄园教案,为弄清教徒们的活动,联邦调查局使用两种机器人,一种是Remotec公司的Andros VA型和Andros MarkVIA 型移动机器人,另一种是RST公司研制的STV移动机器人。STV是一辆6轮遥控车,采用无线电以及光缆通信,车上有一个可以升高4.5米的支架,上面装有彩色立体摄像机,该车仅需一人操作,遥控距离达10公里,在这次行动中共出动3台STV,操作人员遥控机器人行驶到距离庄园548米的地方停下来,升起支架,利用摄像机和红外探测器将窗内窥探得一清二楚。 另外,美国于2009年12月向火星发射名叫“火星科学实验室(MSL)”的第三代火星车,它将与2010年10月份到达目的地,它重达600公斤,长度是“勇气号”和“机遇号”的2倍多,携载这辆车的整个飞船总重达3吨,造价9亿美元,其源料供应依靠核能;高达的轮子使得它行动很快,能够在坡度60度的斜坡上正常行驶工作;在电子导航设备的引导下,它就可以开到科学家感兴趣的地方工作。 2、国内研究现状 国内哈尔滨工业大学利用无线局域网技术进行无线通信,成功实现人对HIT-II型自主足球移动机器人的控制和多媒体传输;中国科学技术大学利用无线收发模块PTR3000实现了10台F-180小型足球移动机器人的足球比赛;海尔集团于2000年投产运行的开发区立体仓库中,9台移动机器人组成的一个柔性的库内自动搬运系统,利用每台移动机器人配置的无线通信电台对它们实时远程监控。 可见,人们对第三代火星车的远程控制水平又一次发声质的改变,基本上是随心所欲,当然这些是建立在无线通信的基础上,那时无线通信系统具有更高的实时性和稳定性,机器人的远程控制技术也将成熟。