基本信息
- 项目名称:
- 可定位远程探测智能小车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作B类
- 简介:
- 本方案制作了一款智能探测搜救小车,具有无线数传、采集数据、GPS定位等功能 。可应用于科学勘探,灾难现场的探测和救援。科学勘探:本小车可以很大程度上代替人员进行实地勘探,在节省人力资源,保障人身安全,提高效率等方面大有裨益;灾难现场的探测和协助救援:近年自然灾害频发给人类造成巨大损失,高效准确的组织灾后救援等相关工作已十分重要,本小车可以到达危险的环境,探测环境信息以实现定点有针对性的后续救援。
- 详细介绍:
- 本智能小车具有无线数传、采集数据、GPS定位等功能 。利用无线射频模块(A)与上位机端射频模块(B)通信。上位机发送目的坐标给小车,小车处理后由光电编码器配合到达目的地,到达后将定位的GPS定位的坐标、环境温度数据等回传给上位机。执行任务时如果求救按扭被按下,小车能够立即回传求救信号给上位机。小车能与上位机实时通信,进而对小车实时控制。可以帮助被困者,如发出求救信号(包括经纬度坐标,环境温度等信息)使救援人员定点且有准备救援、运送救济物品等。 本小车可应用于科学勘探,灾难现场的探测和协助救援。(1)科学勘探:本小车可以很大程度上代替工作人员进行实地勘探,从而在节省人力资源,保障人身安全,提高工程落实的效率等众多方面大有裨益。(2)灾难现场的探测和协助救援:对于近年自然灾害频发给人类造成巨大损失,为尽可能减少损害,高效准确的组织灾后救援等相关工作已十分迫切,本小车可以到达危险或者人员不易到达的环境,可以探测环境信息以实现定点、有针对性的后续救援;可以运送物品协助救援。
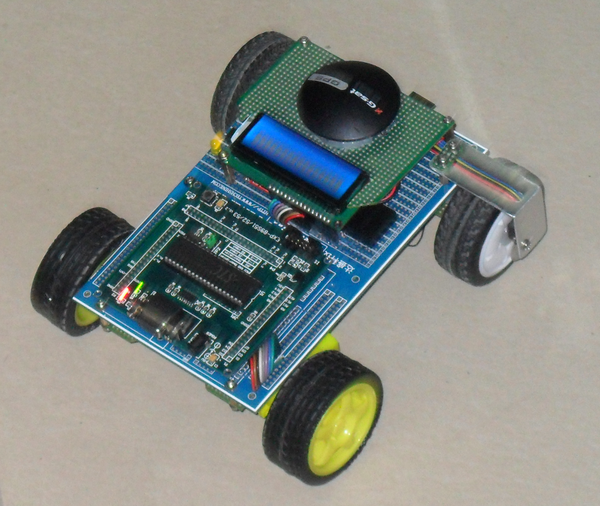
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的:本小车可应用于科学勘探,灾难现场的探测和协助救援。(1)科学勘探:本小车可以代替工作人员进行实地勘探,从而在节省人力,保障人身安全,提高工程落实的效率等众多方面大有裨益。(2)灾难现场的探测和协助救援:对于近年自然灾害频发给人类造成巨大损失,为尽可能减少损害,高效的组织灾后救援等工作已十分重要,本小车可以到达危险或者人员不易到达的环境,可以探测环境信息以实现定点、有针对性的后续救援;可以运送物品协助救援。 设计思路:制作了一款智能探测搜救小车,具有无线数传、采集数据、GPS定位等功能。该智能小车利用无线射频模块(A)与上位机端射频模块(B)通信。上位机发送目的坐标给小车,小车处理后由光电编码器配合到达目的地,到达后将定位的GPS定位的坐标、环境温度数据等回传给上位机。执行任务时如果求救按扭被按下,小车能够立即回传求救信号给上位机。小车能与上位机实时通信,进而对小车实时控制。 创新点:小车可由上位机无线控制、可以进行GPS定位、可以探测环境,所以小车可用于科学勘探、灾难现场协助救援,如受困者发出求救信号(包括经纬度坐标,环境温度等信息)使救援人员定点且有准备救援、而且可以运送救济物品等。方案实用、经济,尤其在人员不方便到达的场合智能小车作用重大。 技术关键及主要技术指标:无线射频收发,GPS搜星定位,小车准确快速平稳的行进,光电编码器准确测量行驶路程,稳定驱动,LCD显示,DS18B20探测温度,求救开关报警。
科学性、先进性
- 小车可由上位机无线控制(基于无线射频收发模块24L01)、可以进行GPS定位(模块性能稳定,干扰小,信号强度高)、可以探测环境(DS18B20探温),可用于科学勘探、灾难现场协助救援,帮助被困者,如发出求救信号(经纬度坐标,环境温度等信息)使救援人员定点救援、运送救济物品等。方案实用、经济,尤其在人员不方便到达的场合智能小车作用重大。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 模型、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本智能小车具有无线数传、采集数据、GPS定位等功能 。可应用于科学勘探,灾难现场的探测和协助救援。(1)科学勘探:本小车可以很大程度上代替工作人员进行实地勘探,从而在节省人力资源,保障人身安全,提高工程落实的效率等众多方面大有裨益。(2)灾难现场的探测和协助救援:对于近年自然灾害频发给人类造成巨大损失,为尽可能减少损害,高效准确的组织灾后救援等相关工作已十分迫切,本小车可以到达危险或者人员不易到达的环境,可以探测环境信息以实现定点、有针对性的后续救援;可以运送物品协助救援。 方案实用、经济,无论科学勘探还是灾害现场探测救援皆具有重大作用。小车开发设计立足于实际,用途广泛,意义重大,非常具有开发价值。
同类课题研究水平概述
- 移动机器人是机器人学中的一个重要分支,出现于20世纪60年代。当时斯坦福研究院(SaD的Nils Nilssen和Charles Rosentll等人,在1966年至1972年中研制出了取名Shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。从此,移动机器人从无到有,数量不断增多,智能小车作为它的一个重要分支也得到越来越多的关注。 进入20世纪以来,在科学探测活动中,由于自然条件、现场环境等原因,使工作人员无法深入现场去收集环境信息。在这种社会大环境下智能小车凭借着其体形小、高行动力和智能控制等优点无疑成为了最佳探测工具。杨大明2009年在 《探测机器人的基本性能要求》一文中指出,在人员无法到达的现场,最重要的就是能快速到达指定地点并快速获取环境状况。 2001年黄辛超,殳国华《用于创新类课程平台智能小车实验系统的设计》硬件上采用了无线数据传输模块实现单片机AT89S52和上位机之间的数据通信。系统软件实现了小车与上位机之间的单向传输。 2007年孙颖《基于路径规划的智能小车控制系统研究中》指出目前的对智能小车的研究虽然已经有了初步成果,但是对于小车的路径优化问题以及小车的定位问题目前还是无法解决的。 这些都充分表明,智能小车虽然是在不断发展,但是都难以在真实的灾难现场发挥作用。相比之下,国内对移动机器人的研究要晚于国外,因此我国的智能探测小车还有很大的发展空间。本设计借鉴了他人设计的优点,结合了自身的创新点,完善了智能小车的功能,旨在做出一款适合当今国内外灾难频发等局势的智能探测小车,以解众场合燃眉之需。