














搜索

作品简介: 该智能遥控巡逻车具有自动和手动巡逻检查仓库,并能通过手工制作的机械臂对物体进行手动和自动搬移的功能;它能够通过鼠标定位技术准确定出在仓库中的位置,并实时向上位机软件发送视频图像;是一个可以在恶劣的仓库中代替人完成巡逻、搬运物体的工作的智能机器人。

作品简介: 跟随已有的黑线路线行进,在碰到障碍物时采取相应的避让行动,“看见”光线而跟谁它移动,锦上添花的发光行为,两只眼睛应用仿生学原理加上巧妙地机械设计,使得模仿出人眼的转动的度数约45度(不至于眼睛转到后面去了)使得电子眼时时注意着黑线,随着外界环境的变化而做出相应的反应实现智能化。

作品简介: 机器人通过传感器识别路径,检测前方是否有障碍物,综合处理后规划行走路径,并通过可人为调整视角的摄像头采集现场信息。适用于大部分人无法进入的工作环境,如进行设备巡视、工程探险勘测、军事侦察、煤矿井下勘探、排雷排爆现场信息采集、抢险救灾、实时跟踪及一些需要引导的情况等。

作品简介: 本作品主要抓住人在做饭时的火候,重量,时间三个主要因素而设计的。
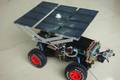
作品简介: 本作品利用了太阳能作为辅助能源设备,符合当前时代发展要求,具体设计时太阳能可以直接给系统供电,也可以给锂电池充电储能,克服了太阳能的不稳定输出。针对当前太阳能利用方面的局限,设计了可折叠电池板功能,自动寻光功能,分别来弥补太阳能利用效率低下及太阳光方位改变的问题,解除了在利用方面两大致命限制,具有很好的推广前景。

作品简介: 随着在城市的快速发展,城市垃圾问题逐渐被人们关注。而垃圾的及时清理与管理问题尤其突出。而我们开发的主要目的是设计一种统一管理城市垃圾桶的智能系统,改变已有的垃圾清理模式。系统由终端智能垃圾桶,调配中心,车载接收端三个部分组成。能够对整个区域内的垃圾桶状况进行监测,根据收集的信息规划垃圾收集路径,更加高效合理地管理城市垃圾。

作品简介: 在过去十余年间,餐饮业发展速度远远超过GDP的发展水平,常年保持在年增长率20%以上。目前,餐饮服务业使用的机器人在国内外基本尚未出现,在中国乃至世界,机器人在社会服务行业代替人类工作领域的研究基本上是一个空缺。因此,机器人应用于服务业具有十分重要的意义和推广应用价值。它实现同时为多个桌子智能自动送物和收物,还具有人性化的语音提示等功能。创新点:首创;效益高;实用性强,效率高;成本较低等。
上一页 1 下一页
