














搜索

作品简介: “超影”微型涡轮喷气发动机结合机械、材料科学、运动控制、流体力学等多学科理论,进行技术创新与综合设计,完成了微型离心压气机,微型蒸发管式环形燃烧室,微型轴流涡轮,保形通道式扩压器以及微型控制器等的设计,用仅仅20个零部件就实现了发动机8一级的推重比。 “超影”可以直接装备到高级喷气航模、应急和科学实验平台以及高速靶机、微小型导弹等微小型无人武器系统,同时,以本作品为基础可以发展出用...

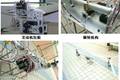
作品简介: 本作品将基于平面标定板的标定方法和自标定相结合,提出了一种简便易行的三步优化标定方法。并且用随机模式投射器,瞬时投射一幅随机图像到被测物体表面,一次测量只需要在瞬时摄取一个图像对,就可以生成物体表面的三维点云数据。基于姿态传感器实现了多视角测量数据的自动拼合。同时在双目立体测量的基础上,将随机模式投射器分别和两个摄像机组成单目测量模块,进行物体表面点云测量。
作品简介: 小型倾转旋翼飞行器是一种可以垂直起降、空中悬停、低速前飞,通过旋翼倾转可以像飞机一样高速巡航飞行的独特构型飞行器。该作品由旋翼、机翼、机身、水平尾翼、垂直尾翼、旋翼短舱系统、动力装置、倾转机构、起落架和飞行控制系统等组成。我们完成飞行器的总体设计、结构布局;设计、加工相关设备;开发机载控制系统、航姿测量系统以及地面监控系统,并展开了一系列地面、空中飞行试验,取得小型倾转旋翼飞行器全模式飞行。

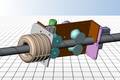
作品简介: 基于超磁致伸缩材料的应用研究目前已成为国内外机电工程领域研究的热点。在超精密加工领域,因其具有应变大、能量密度高以及驱动电压低的特点,可以替代目前主要采用的电致伸缩微位移驱动器,具有良好的应用前景。 本作品的基本思路是利用超磁致伸缩材料的磁机耦合工作原理,开发和制作基于超磁致伸缩材料的微驱动系统,主要解决微驱动系统的结构设计和控制方法等关键技术。作品使用国产Terfenol-D材...

作品简介: 现有电动自行车刹车都是通过闸皮单方面受力,制动转轴,使车轮停止转动;而低噪音电动自行车刹车装置采用了“双拉”的形式,能够让闸皮均匀受力,减少磨损,有效地降低了刹车时所带来的噪音大的问题,并且制动效果好,成本低,寿命得到很大程度的延长。随着今后生活质量的不断提高,人们对周围环境的要求也决定了低噪音电动自行车刹车将渐渐得到大家的认可。

作品简介: 随着生活节奏的加快,人们用眼越来越厉害,眼睛得不到及时的休息,视疲劳问题严重。目前,市面上的眼部保健仪器多通过红外加热、磁疗以及穴位按摩等原理来缓解视疲劳;药物治疗多采用直接滴眼药水的方式。这些方法多存在不良反应及使用不便等缺点。尚未见到利用药物雾化缓解视疲劳及治疗眼部疾病的保健仪器。 本课题组结合中医药特色,将传统的中药热蒸汽熏眼的医疗方式、现代的物理治疗方式与护眼装置相结合,研制...
作品简介: 多功能线缆机器人是一种能在线缆(钢索)上自动行走的智能机器人,实现了线缆检修与除冰功能;它可以对斜拉桥、悬索桥钢索、电梯、土木施工升降机、矿井升降机、吊车等设备钢索线缆进行损伤检测,也可以针对严寒地带输电线缆、斜拉桥、悬索桥钢索等进行除冰,有效地为生产生活服务。在机器人爬升结构设计方面,本项目开发了一种锥面自锁夹紧机构,并对夹爪夹紧力、弹簧预紧力等进行了严密的力学分析;该机构能满足机器人爬升...

作品简介: 本作品结合国内外无人艇以及多体船的相关研究,设计了这种全新概念的水面多体多用无人艇。多体无人水面艇采用模块化结构, 通过更换任务模块可执行不同使命,而且多体无人艇具有较高的负载能力、良好的平台稳定性和更好的航行性能,因而本作品提供了一个多体无人艇的模块化公共平台,便于艇上多功能设备系统的灵活布置和功能实现,拓展了其军民多用途方向的发展。

作品简介: 本作品设计了一种新概念扇翼飞行器——扇翼机,其飞行原理与现有固定翼、旋翼飞行器的原理不同,它是在机翼上表面安装横流风扇,利用风扇旋转时产生的升力和推力供给飞行器进行飞行。该飞行器具有超短距起降、大迎角不失速、操纵控制简单、低速飞行稳定性和安全性好等优点。它比直升机结构和操控系统简单,巡航效率高;比固定翼机起降距离短,低速飞行时有效载荷大,是一种性能介于直升机和固定翼机之间的新型飞行器。

作品简介: 本作品构造了一种集小水线面三体船、水翼艇和冲翼艇三者优良性能于一体的新型高性能复合船型——水面监测复合三体无人冲翼艇,突破了目前国内外只选用刚性充气艇和单体滑行艇作为无人艇平台的局限性。同时开发了其水面监测(包括目标监测和风浪流等环境监测)功能和避碰功能,在弥补海洋浮标的缺陷之余,能够大大降低人员成本,可应用于目标监测、水文信息监测、水面巡逻、水面缉私等领域,拥有显著的应用价值和产生好的经济效益。

作品简介: 该作品的机械系统由一个三自由度基本模块和一个一、二转动自由度的扩充模块组成,其中,三自由度基本模块采用一个二滑块五杆并联机构和垂直于其运动平面的一个上下移动机构构成;控制系统采用数控技术,它由触摸屏、可编程控制器(PLC)、交流伺服电机及其驱动器组成。通过安装不同的功能操作器(例:铣刀、喷枪、焊枪、磨头),可实现切削加工、喷涂、焊接、抛光等大范围平面或空间曲面操作等。
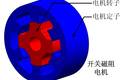
作品简介: 本作品将开关磁阻电机和磁轴承有机结合,首次采用双端对称三自由度磁轴承结构,对系统进行综合设计,使电机转子稳定悬浮在定子中央,实现7.5Kw开关磁阻电机35000rpm稳定悬浮运行,线速度达到141m/s。开关磁阻电机摆脱普通机械轴承的束缚,可以达到更高的转速和功率等级,拓宽了开关磁阻电机的应用范围,在多电/全电飞机、起动/发电系统等高速大功率领域具有非常广阔的应用前景。

作品简介: 本作品由秸秆切碎装置、旋耕(条耕)装置、深施肥装置、播种装置、起垄装置、镇压装置等组成。由中型拖拉机配套牵引。秸秆切碎、旋耕(条耕)、深施肥、播种、起垄、镇压5道工序联合作业,其中播种、起垄可互换。该作品还配套了电磁激振器对播肥头施以高频振动,实现了播肥头的顺利脱土以及肥料的不堵塞,在侧边立轴上安装应变片及应变信号接受环,提高了作业的安全性,还对播种、施肥实施实时监测,保证了工作的可靠性。
作品简介: 本作品设计的内毒素专用超滤膜以及在线内毒素检测仪器,从根本上解决了超滤技术在注射剂生产中的热原去除难题,在线检测仪器实现了内毒素污染状况的实时监控,提高注射剂用药安全性。这两件发明的有机组合串联,达到了热原指标零风险生产的最高技术要求,使注射液生产过程体系能够保障内毒素含量达到免检的安全限量要求,确保注射液产品质量。

作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

作品简介: 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。

作品简介: 目前传统烟控方式不能有效的隔烟,还会影响人员疏散的视野和逃生速度。于是,提出设置“防烟缓冲区”的设想,将传统的前室正压送风防烟方式改变为部分前室正压送风和疏散通道的防烟空气幕垂向送风,从而在前室和空气幕之间形成一个“无烟缓冲区”,通过全尺寸风洞实验与FDS模拟比较,得出“防烟缓冲区”不仅能够提高火灾烟控效果,改善人员疏散安全环境,而且排烟能力提升,新鲜空气量减少,降低次生灾害的发生。

作品简介: 该仪器是一种用于云图获取、拼接、处理和云的定量分析与云状分类识别的重要气象仪器。该设备通过实测数据实时识别天空中云的状态和趋势,自动避光连续拍摄将图片进行无缝拼接并自动编号归类,实现全天空云图观测自动化,代替目前的人工观测。克服了镜像法镜头和太阳遮挡对图像的损伤,鱼眼镜头产生的图像畸变和无法单独保存重点图像的缺陷。仪器主要包括云台、图像采集装置、图像处理与拼接软件、图像识别软件和通信系统等5部分。
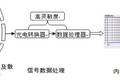
作品简介: 本作品属聚光型光伏发电供热系统,主要由聚光子系统、冷却子系统、伺服跟踪子系统组成。聚光子系统采用双抛物面均匀反射新型聚光方法,可获得高平行度、高聚光比的汇聚光;冷却子系统采用滤红外线和水冷法相结合的新型冷却技术,改善对光伏电板的降温效果;伺服跟踪子系统采用太阳轨迹跟踪的日历法结合光伏电板功率扰动爬山法的新型无光传感器组合跟踪策略,减少光检测元件的硬件投资,提高跟踪速度,增强跟踪的稳定性和抗扰能力。

作品简介: 本项目主要对六个大类九种产品(电动泵用单向轴承、深井泵用单向轴承等)进行外观创新设计,形成了国内外首创非标单向系列轴承关键核心技术体系。在结构上,确保了结构简单、精密度高、互换性强;在效能上,在实现高效节能的同时,能够保证较高的轴向、径向负载和稳定性。该系列产品已形成规模生产,出口到意大利、马来西亚、印尼等。例如:船用单向轴承的年需求量约为20万套,直接经济效益2000多万元。
