














搜索

作品简介: 本作品由秸秆切碎装置、旋耕(条耕)装置、深施肥装置、播种装置、起垄装置、镇压装置等组成。由中型拖拉机配套牵引。秸秆切碎、旋耕(条耕)、深施肥、播种、起垄、镇压5道工序联合作业,其中播种、起垄可互换。该作品还配套了电磁激振器对播肥头施以高频振动,实现了播肥头的顺利脱土以及肥料的不堵塞,在侧边立轴上安装应变片及应变信号接受环,提高了作业的安全性,还对播种、施肥实施实时监测,保证了工作的可靠性。

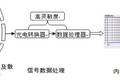
作品简介: 完成了一套在线中子测水系统的研制。采用了更加合理的热中子探头,降低了对中子源的要求,提高了安全性,并在一定程度上节省了成本。此外,本项目在核信号处理系统中加入了功率放大电路,提高了信号的传输能力,有效实现了控制室和放射源的分离,降低辐射威胁。输入到机箱的信号经处理还可以反馈调节生产线的生产。 研制的样机正在一家玻璃厂试用中。

作品简介: 本作品借助由温控仪、变频器和循环泵等组成的,基于流体流量控制的恒温控制系统,实现太阳能热利用的中低温段恒温控制。通过热电阻采集系统温度的变化量,经系统PID参数控制热油泵,调节热交换器的热交换量,达到温度自动恒温控制。 这在技术实现上不同于现有技术,其实现了太阳能热利用的中低温段恒定控制,且恒温精确度高,填补了太阳能热利用中低温段恒温可控的空白,为太阳能的利用提供了一个新的市场。
作品简介: 本作品设计的内毒素专用超滤膜以及在线内毒素检测仪器,从根本上解决了超滤技术在注射剂生产中的热原去除难题,在线检测仪器实现了内毒素污染状况的实时监控,提高注射剂用药安全性。这两件发明的有机组合串联,达到了热原指标零风险生产的最高技术要求,使注射液生产过程体系能够保障内毒素含量达到免检的安全限量要求,确保注射液产品质量。

作品简介: 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。

作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

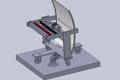
作品简介: 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。

作品简介: 该项目提出采用交流电动机定子结构(旋转磁场发生器)产生的旋转磁场使工件与磨具间产生非机械方式的相对运动,实现对不锈钢管内孔表面磁力粗、精加工的新思路。该结构既能实现工件与磨具间非机械方式的相对运动,又能对磁感应强度大小实现调整,并克服了其它方法产生的旋转磁场的漏磁现象、圆周性不好等缺陷,为套筒类零件的内孔表面、尤其是对由于本身的特殊性不宜做高速旋转运动的零件提供了一种行之有效的加工方法。

作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 针对驻岛部队小分队在平时训练和野战条件下的淡水保障难题,该项目通过合理设计工艺流程、各部件结构及尺寸,研制了具有布局合理、结构紧凑、体积小、质量轻、携带方便、机动性强、淡化水量大、一人手动操作等特点的轻便型海水淡化装置。

作品简介: 鉴于目前国内外扩眼器存在的服务费用高、扩眼效率低和工作安全性差等方面的不足,本文研制了一种安全性和可靠性较高的新型液压式随钻扩眼器。该扩眼器具有性能稳定,作业范围广和经济效益高等特点。其独特的设计弥补了传统扩眼器工具存在的缺陷,打破了国外的技术垄断。经过地面测试和海上试验井的应用检测,该扩眼器各项指标均达到了设计要求,扩眼效果良好,能满足我国陆地和海上油气田扩眼作业要求,具有较强的市场竞争力。
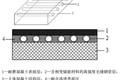
作品简介: 本课题通过引入梯度功能设计方法和相变储能材料进行水泥混凝土路面结构及材料设计 ,通过分层浇注、界面处理等技术,制备出新型水泥混凝土路面结构形式,确定主要材料配比,突出路面诸多优异功能。该路面结构的设计和制备对当前混凝土路面材料的发展具有较好的推动作用,同时利用相变储能材料进行防冻设计,具有节能、环保等诸多优点,符合我国公路交通技术的发展新方向。

作品简介: 本作品针对智能电网双向的电力潮流和数字信息流,研发了一种实时测量双向通信智能电表。 1、储存刷新模块为智能电网高效节能管理,实时提供带时标的电量信息;2、双向交互式通信模块,可接收调控信息及浮动电价,发送电量及异常故障信息;3、双向电量计量软件,通过软件判断功率因数,成功地集成用户侧的分布式新能源;4、通过发送检测到的故障信息,电力公司可快速定位诊断电网故障点。

作品简介: 轮履两用救援灭火小车,用于现场有毒、易燃、易爆、高温、高辐射等工业危险环境。 电力驱动,节能环保;轮履两用,全地形通过能力强;网络化智能控制,灭火效率高,克服了现有设备机身沉重、机动能力差、适应环境差等弱点。针对不同的灾难特点及救援要求,依托该小车底盘装备不同的设备可执行多种救援任务。

作品简介: 针对现有的机器人结构复杂、体积大、成本高,不利于在特定环境下工作等问题,提出一种基于谐振驱动原理的微型移动机器人。具有控制灵活、速度快、功耗低、便于批量制造等优点。本项目将先进的谐振驱动技术应用在传统的机器人领域,用机构的振动来产生运动,赋予微型机器人新的理念,开发出致动、传动、执行一体化的移动机构。

作品简介: 本作品发明了非有效接地配电网智能消弧与接地保护方法,在配电网瞬时性接地故障时,实现瞬时故障100%消弧,从而彻底消除由瞬时性故障引起的停电事故;在永久接地故障时,改变注入电流,检测并断开故障线路,实现接地保护,将接地保护可靠性由原来的20%提高到70%。作品已在全国应用,彻底解决了国内外长期存在的配电网接地故障消弧与保护难题,居国际领先水平。

作品简介: 该仪器是一种用于云图获取、拼接、处理和云的定量分析与云状分类识别的重要气象仪器。该设备通过实测数据实时识别天空中云的状态和趋势,自动避光连续拍摄将图片进行无缝拼接并自动编号归类,实现全天空云图观测自动化,代替目前的人工观测。克服了镜像法镜头和太阳遮挡对图像的损伤,鱼眼镜头产生的图像畸变和无法单独保存重点图像的缺陷。仪器主要包括云台、图像采集装置、图像处理与拼接软件、图像识别软件和通信系统等5部分。
作品简介: 本作品属聚光型光伏发电供热系统,主要由聚光子系统、冷却子系统、伺服跟踪子系统组成。聚光子系统采用双抛物面均匀反射新型聚光方法,可获得高平行度、高聚光比的汇聚光;冷却子系统采用滤红外线和水冷法相结合的新型冷却技术,改善对光伏电板的降温效果;伺服跟踪子系统采用太阳轨迹跟踪的日历法结合光伏电板功率扰动爬山法的新型无光传感器组合跟踪策略,减少光检测元件的硬件投资,提高跟踪速度,增强跟踪的稳定性和抗扰能力。

作品简介: 本作品主要用于石油站场热媒炉内螺旋导热管壁的清扫工作。采用四轮接触式吸附,能够更好地适应导热管尺寸的不一致性;合理的传动结构使车体能顺利通过螺旋管顶部不致脱落;自适应曲面结构使机器人稳定有效地沿着螺旋管壁行走而不致跑偏,总体上很好地满足了工业应用的需求。 机器人清扫效果好,工作效率高,无污染。系统设计可靠、操作方便、便于维护、成本低,适合实际生产需要,有广阔的应用前景。

作品简介: 利用键盘为主体,对鼠标进行拆卸、改进和设计,把鼠标的左右软键、中键、滑动滚轮及技术成熟的光电鼠标探测头组合至键盘的左右上下方向键里,在键盘和方向键之间装有可在任意方向旋转的机械鼠标的滑动滚球,利用这个方法可以增加鼠标的又一项功能,即鼠标控制画面旋转角度,能有效解决3D网游游戏中人物旋转角度不精确导致操作的致命失误,有效解决了3维立体绘图的诸多不便如绘制角度的选取和修改绘画观察等。
