基本信息
- 项目名称:
- 基于单目视觉的高速公路安全车距预警系统
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作B类
- 简介:
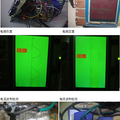
- 高速公路行车时驾驶员易出现视觉疲劳和失速现象,此时难以准确判断安全车间距,易导致追尾事故发生。为此,开发了基于单目视觉的高速公路安全车距预警系统。本系统通过安装在车辆上的摄像机实时获取前方道路场景与车辆信息,采用多特征融合技术和单目视觉算法实现前方车辆识别和车距计算,在车辆处于危险车距时进行自动语音报警,同时将车辆信息通过3G网络发送给监控平台,有利于高速公路车辆事故远程监测、紧急救援和信息共享。
- 详细介绍:
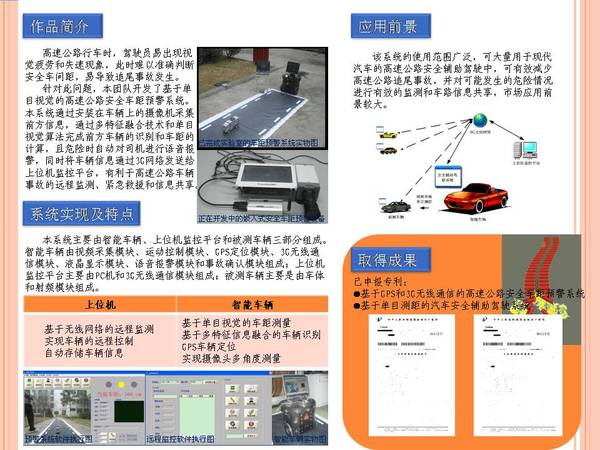
- 高速公路行车容易使人产生视觉疲劳和失速现象,在这种情况下驾驶员难以准确判断安全车间距离,易导致车辆追尾事故发生。 在追尾危险的判断中,跟车驾驶员判断和决定的依据是估计到达前车的时间,而这一时间与距离、速度、相对速度和反应时间有很重要的关系,因此拓展驾驶员的判断识别范围,以增加对周围信息的掌握和处理能力是非常必要的。针对这种情况,我们设计并开发了一种基于单目视觉的高速公路安全车距预警系统。 本系统主要由智能车辆、上位机监控平台和被测车辆三部分组成。智能车辆由视频采集模块、运动控制模块、GPS定位模块、3G无线通信模块、液晶显示模块、语音报警模块和事故确认模块组成;上位机监控平台主要由PC机和3G无线通信模块组成;被测车辆主要是由车体和射频模块组成。 本系统通过安装在智能车辆上的摄像头采集道路前方车辆信息,通过多特征信息融合技术对被测车辆进行识别和定位,并采用单目视觉算法完成对前方车辆车距的计算。基于绝对安全车距模型,依据当前车辆的车距、车速信息,判别车辆是否处于安全车距范围之内。若车辆处于危险状态,系统对驾驶员进行危险提示,并发出语音报警。 同时将车辆GPS定位信息、车速和车距信息,通过3G无线网络发送给上位机监控平台。上位机监控平台根据车辆的车距和车速信息判断车辆的安全状态,若判断为发生交通事故,与司机进行事故确认后,通过车辆GPS定位信息及时进行紧急救援,同时将事故信息发送给该路段的其他车辆,避免发生交通阻塞。 本系统的使用范围广泛,具有较高的实用价值,可应用于高速公路汽车辅助安全驾驶中,可有效的减少高速公路追尾事故,并对可能发生危险情况的车辆进行有效的监测以及紧急救援,市场的应用前景大。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1.发明目的: 高速公路行车容易使人产生视觉疲劳和失速现象,在这种情况下驾驶员难以准确判断安全车间距,易导致车辆追尾事故发生。目前市场上还未发现任何一种可以对驾驶员进行安全车距预警的产品,因此开发了本作品。 2.基本思路: 在现有的车辆上加装一套数字图像处理系统,完成车辆前方视觉场景的采集,并通过多特征信息融合技术和单目视觉算法进行前方车辆识别和车距计算。在车距过近时,系统自动对司机进行语音报警,同时将车辆GPS定位信息和运行状态信息通过3G无线网络发送给上位机监控平台,便于事故的远程监测、紧急救援和信息共享。 3.创新点: (1)采用单目视觉技术进行车距检测,具有稳定性高、速度快等特点; (2)采用基于单帧静态图像的测距模型,在前方物体尺寸未知的条件下能够测量目标的距离,并可实现摄像头多角度下的精确测量; (3)利用3G无线网络将车辆GPS定位信息和现场信息发送到上位机监控平台,便于管理部门对事故进行确认、实施紧急救援和交通疏导。 4.技术关键: 采用自学习的方法提取路面背景特征,采用路面和车辆的灰度、纹理、边缘、形状等多项特征信息进行融合,实现前方车辆的识别与定位,降低了复杂环境和天气变化对算法稳定性的影响。 5.主要技术指标: (1)最大前车检测距离:150m; (2)单目测距的测量误差在5%之内; (3)摄像头采集图像信息的采样速率达到30帧/秒; (4)每幅图像的处理速率达到15帧/秒。
科学性、先进性
- 现代汽车测距主要有四种方式:超声波测距,毫米波雷达测距,激光测距,摄像系统测距。超声波测距受外界影响大,且距离越远,超声波损失越严重;毫米波雷达测距存在电磁波干扰问题;激光测距存在成像速度过慢、价格高的问题。 基于单目视觉的高速公路安全车距预警系统的测距方法是模拟人眼的摄像系统测距,主要是实现车距的精确测量,是一个新的测距方式,与现有的汽车测距相比,实质性技术特点为: (1)采用自学习的路面背景更新技术获取路面的特征参数,该方法能够克服一些环境的影响; (2)采用多特征信息融合技术对视野中的车辆进行识别,实现对车辆的准确定位与跟踪; (3)基于单帧静态图像的单目测距模型,在不需要已知物体实际尺寸的条件下,通过摄像机内外参数的标定,能够测量前方物体的绝对距离,并可实现摄像头多角度下的精确测量,满足对前方车辆测距的要求; (4)采用GPS定位和3G无线网络相融合的技术,实现事故车辆的远程定位和信息交互。
获奖情况及鉴定结果
- 1.本作品于2011年6月获第八届西安高新“挑战杯”陕西省大学生课外学术科技作品竞赛特等奖; 2.本作品于2011年4月获长安大学第七届“挑战杯”大学生课外学术科技作品竞赛特等奖; 3.本作品在2010年10月长安大学科技节上展出。
作品所处阶段
- 已经完成实验室阶段的样机开发,目前正在进行实际车载实验和功能完善。
技术转让方式
- 知识产权转让或合作生产
作品可展示的形式
- ■实物 ■模型 ■现场演示 ■图片 ■录像 ■样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.使用说明: 本系统在初次装车时,需要进行系统标定和参数设置。当车辆驶入高速公路时,系统首先对路面环境进行短时间自适应学习,然后开始实时检测前方车辆并计算本车与前车的距离,当本车处于危险车距时,系统将对司机进行危险提示,同时向上位机监控平台发送车辆信息,实现车辆远程监测、事故的紧急救援和信息共享。 2.技术特点和优势: 该作品的技术特点是采用自适应学习的路面背景跟踪算法和多特征信息融合技术实现前方车辆的准确识别与定位。优势是安装方便、成本低廉、易于推广。 3.适用范围和推广前景: 该系统可作为家用轿车安全预警的加装设备,也可作为汽车出厂前选购配件。将该系统用于高速公路车辆安全辅助驾驶,可有效减少高速公路追尾事故。我国是汽车生产和销售大国,该系统具有良好的推广前景。 4.市场分析和经济效益预测: 截止2010年,我国的汽车保有量超过7000万辆,年销售量为1800万辆,该产品有巨大的市场空间。每套系统按1500元售价,如一年销售10万套,年销售额将达到1.5亿元。
同类课题研究水平概述
- 高速公路行车容易使人产生视觉疲劳和失速现象,在这种情况下驾驶员难以准确判断安全车间距,易导致车辆追尾事故发生。另外,追尾事故还将会导致二次事故的发生和严重的交通拥堵。 本团队对相关文献进行了检索,检索结果表明:目前国内外对该类课题的研究主要集中在无人驾驶智能车辆的研究与开发,针对安全车距预警专门设备的研究很少见到报道。以下是本团队的检索文摘。 1.国外研究状况 美国卡内基•梅隆大学机器人研究所研制的NavLab系列智能车辆利用激光雷达和视觉传感器探测目标,美国军方研究的DEMO III智能车辆采用雷达与机器视觉融合技术探测障碍物。意大利的MOB_LAB研究的菲亚特18Maxi车型智能汽车,通过车前一台CCD摄像机采集的道路信息,预测车辆之间的安全距离。德国Braunschweig科技大学开发研制的智能车辆采用了多种不同的传感器用于障碍物的探测和跟踪,其立体视觉传感器安装在后视镜后面,主要针对中远距离的障碍物,它兼有障碍物探测和路径识别功能。富士重工利用2个CCD摄像机采集的三维信息来识别道路标线和前方障碍物。丰田公司使用毫米波雷达和机器视觉共同探测前方障碍物,毫米波雷达用来探测障碍物距离和相对速度,CCD负责检测车道及前行车辆,并控制雷达的方向。 2.国内研究现状 我国在智能车辆和安全辅助驾驶领域的技术研究比国外发达国家要晚,目前开展道路上本车前方车辆识别方面研究工作的单位主要为一些院校和科研机构,如吉林大学、清华大学、重庆大学等院校。清华大学的汽车安全与节能国家重点实验室研究了汽车主动碰撞系统。该系统采用了激光雷达和毫米波雷达实现道路上本车前方的车辆探测。吉林大学研制开发出具有障碍物识别功能的室外视觉导航智能车,该型智能车利用视觉和激光雷达融合技术实现本车前方车辆探测及车距保持等控制功能。 综上所述,国内外的车辆安全距离测量一般采用雷达测距、超声波测距、激光测距和视觉测距的方法。但是这些车距方法都存在着不同的缺点,雷达测距受相互间电磁波干扰严重,超声波测距测量距离比较短,激光测距对器件和信号的处理要求高,而且这些测量方法都没有运用到高速运动状态下的远距离测量。同时,国内外虽然有很多关于机器视觉测距的研究,但都没有将机器视觉测距应用到现实生产生活当中。