














搜索
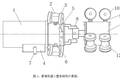
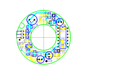
作品简介: 本作品的目的是要克服现有技术的困难和缺点,创造出优于现有产品的管道行走机器人,尝试通过使用一个主动器使机器人在完成沿着管道运动的基础上尽量减少机械和电子装置的复杂程度。 本作品是在科学分析、克服现有机器人的各种缺点的基础上,提出的一种可遥控无需外接动力设备的新型螺旋型驱动可伸缩变径管道机器人。 其工作原理是:通过电机驱动圆形转子转动,圆形转子外壁上的三组轮子因贴紧...

作品简介: 与传统的设计相比,此装置将油门踏板受力面旋转90°,呈竖直状态立于刹车踏板右侧,而刹车踏板作用力方向保持不变。由于区别了两个踏板的施力方向——刹车踏板向下、油门踏板向右,因而可以有效避免误踩。另外,在紧急制动时不需要将脚从油门踏板转向刹车踏板,节省了刹车的操作时间。本设计还在现有电子油门信号输出处增加了一块信号处理电路,通过该电路实现自动定速巡航、油门和制动踏板电气互锁、定速巡航自动取消等功能,提...

作品简介: 该系统通过对汽车转弯安全的分析,运用悬挂的自动倾斜控制(ATC)系统,改变汽车转弯时的倾斜度,利用地面对车辆的支持力在向心方向的分力,为车辆转弯提供向心力。经实际测试,该系统能够有效地控制车体倾斜,且响应速度快(响应时间低于0.1s),计算准确率高(出错率低于1%),不会出现晃动及摇摆。

作品简介: 现今全国各城市,尤其是交通繁忙的大型城市的道路上都设有公路分隔栏。公路护栏需要定期清洁和油漆翻新维护,然而如今的护栏维护工作仍然依靠落后的人手操作,导致环境污染、阻塞交通、危害人员健康和浪费油漆等问题。基于这种现状,本小组设计了一组具有油漆气雾回收、劳动强度轻、占地面积小、密封喷涂等特点的模块化工作机器组代替落后的手工作业,以解决人手作业的多种问题。
作品简介: 本项目主要研究后轴控速和1:1线性助力驱动。即在后轴上贴上电阻式应变片,当人骑车前进时链条拉动后轴,使后轴发生形变。应变片感应形变后电阻变化,其在电桥电路中,使电路输出的电压发生改变,形变越大电压变化越大。此电压变化信号通过放大后,经AD转换被单片机读取。根据电压的大小来改变单片机PWM的脉冲宽度,从而控制无刷电机的功率输出。 本比例助力传感器系统的优点是经济、精确、工艺简单、维修方便、...

作品简介: 保温杯在日常生活中随处可见,人们在学习,旅游和运动中也都离不开保温杯,但有一个一直困惑着人们的问题就是:现在市场上保温杯的质量良莠不齐,而价格又是参差不齐,最主要的就是有些保温杯的保温效果并不能令人满意,普通的是2个小时左右,好一些的最多才可以达到4—-5个小时。这样的保温效果和保温时间远远不能达到现代人生活的需要,而在当今大力倡导可持续性发展的今天,本发明在于提供一种费用低、结构简单、经...

作品简介: 新型直流电子负载由硬件系统(包括AVR控制器、驱动器、信号检测器等)、智能软件系统(包括控制算法、数据检查、控制输出、故障自诊断等)和上位监控系统(采用VB设计的数据采集、曲线显示等)等组成,采用了“AVR微机处理器+智能软件+上位监控+总线通讯”的技术方案;提出了“控制、检测、监控、通讯”等功能于一体的研究方法;涵盖了微机控制、智能控制、自动检测、上位监控、总线通讯、故障诊断等多种先进技...
上一页 1 下一页
