














搜索
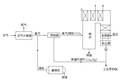
作品简介: 为了降低电站锅炉的整体燃料消耗或部分替代贫乏燃料,本文提出了一个基于富氧点火系统的煤粉锅炉点火装置。小煤粒适用于该系统。这种新型燃烧器包括内、外和中套管,采用内、外套管与中套管双重换热技术。富氧燃烧器已批准一项发明专利。实验研究和数值模拟分析验证了理论的可行性。研究表明:它可以提高最大燃烧速度和平均燃烧速度,并减少煤粉燃烧的着火温度和燃尽温度。此外,煤粉燃烧更容易点燃和全面改善综合燃烧特性指数。

作品简介: 本系统旨在为老年人和慢性疾病人群提供实时、持续的体征监测。便携式体征监护子系统,实现生理数据(体温、心电、脉搏)的采集、显示、存储及再现等功能,具有体积小、功耗低、实时监护、用户定位、短信报警等特点。分布式体温监护子系统,主要对病区病人体温的集中监测,减少了护士的工作量;可以实现数据的远程访问,便于医生对病情的异地诊断。

作品简介: 本项目是一台履带式双机械臂机器人,主要可执行地震救援、排爆、特殊环境检测和侦查等危险工作。双机械臂采用电动推杆驱动,单臂负载力达到30kg。结合短距离和中远距离无线传输方式,保障机器人在1500m范围内的无线控制。该机器人可携带有效载荷150kg,最大速度为35m/min,攀爬30°斜坡。利用机器人运动学方程的正、逆解,结合控制算法解决了双臂干涉问题。采用拟人化的控制方式,提高机器人可控性。

作品简介: 轮式/四足可变形智能侦察机器人是一款能在较复杂地形环境下行走运动的侦察机器人,它是在轮式运动的车体上增加四足行走机构,通过车体变形达到行走模式转变的目的,该机器人将轮式行走和四足行走两种运动形式相结合,前者适于平坦地面的轮式快速移动,后者适于较复杂地面(如废墟)上的四足行走。同时可通过自行设计的手持遥控器对机器人移动及摄像头云台进行控制,将获得的传感器数据及视频实时传至手持遥控器及上位计算机平台。

作品简介: 作品应用激光打靶机的理论与方法,在机械式裂缝三向变形测量仪的基础上进行改进、创新,立足于西安地裂缝的工程实际,突破现有技术瓶颈,自行设计与制作电路,将现有的激光测距仪技术与光电技术结合,不仅实现了传统技术与前沿技术的整合,而且在一定程度上完成了光电学与地质学跨学科的技术突破。

作品简介: 本作品通过对地震后灾区道路破坏形式和交通特征的调查分析,提出了震后道路的应急抢修方案,优选轻质高强的玻璃纤维环氧树脂材料,设计了一种结构轻盈、适用范围广、施工快捷、可储备重复利用的格栅-土石式应急路面板。运用有限元方法,对这种应急路面板在不利荷载工况下的受力状态进行了数值模拟分析,验证其结构强度的可靠性。同时,对应急路面板的施工工艺展开了相应研究,以最大程度地提高灾区道路抢修的时效性。

作品简介: 针对设施农业中定光强、定光质补光方法的不足,基于光合作用机理分析,提出实时环境监测、特定波段补光与定量决策相结合的精确补光方法,设计了与作物生长过程相适应的智能补光系统。作品考虑温度、二氧化碳对补光效果的影响,根据作物各阶段特征动态调整目标光强,采用实时红蓝光光强与目标光强的差值计算补光量,通过PWM调整LED输出光强,实现精确按需补光。实际应用表明,作品实现了智能化、精确化、低能耗补光。

作品简介: 本项目设计制造了一种高层建筑双向逃生装置,其基本原理是利用钢绳两端交替上下运动实现双向逃生。该装置采用离心摩擦制动,结构简单,具有良好的实用性和经济性。逃生器固定在阳台顶部或侧墙上部,便于安装存放;使用时可迅速转变为工作状态。
上一页 1 下一页
