














搜索

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。

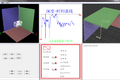
作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。
作品简介: 本作品旨在研制一种利用水声遥控方式控制的水下机器人验证机,该技术涉及到多学科领域。水声遥控系统采用性能优异的水声信道编码技术,使得水声遥控可靠性得到显著提高。通过所建立的动力分配数学模型,控制8个推进器电机的旋转方向和旋转速度。在人工操控条件下控制验证机的姿态和运动,使载体更加适应机器人水下作业。

作品简介: 在消防现场存在着爆炸、有害气体泄露、建筑坍塌及核辐射等众多不安全因素,该作品主要用来解决在如此复杂环境中消防人员亲临火场时的人身安全问题。消防机器人的开发应用可以让消防人员不进入火场,通过消防机器人的自主灭火或消防人员的远程控制即可扑灭火灾。通过将自动控制、人工智能等的综合运用,该机器人实现了自动巡检、报警、灭火等功能,同时又可起到火灾预警功效,防止火灾的进一步扩大,降火灾损失降低到最低。

作品简介: 本作品是在项目组汲取2009年利用机器人处置河南杞县钴-60卡源事件及广州番禺“国际罕见”钴-60卡源事故的成功经验的基础上,针对强辐射、高温、剧毒、易爆等高危环境进施工作业任务的特殊需求,以突发核事故应急保障能力建设对辐射环境下智能机器人系统的迫切需求为背景,综合应用智能机械,控制,通信,电子,辐射防护等多方面的技术,使该作品能在辐射、有毒、高温等危险环境下代替人实施环境监测与事故应急处理任务。

作品简介: 小型组轮式机器人足球比赛是RoboCup机器人足球世界杯赛的主要项目之一,同时也是机器人技术和人工智能理论的良好的实验平台。本项目设计制作的RoboCup小型组足球机器人竞赛及实验平台,可作为小型组足球机器人竞赛的标准平台推广应用,也可以作为功能完备的竞赛系统直接参加机器人足球比赛,还可在此基础上开展机器人技术实验研究,为机器人技术新算法、新模型提供创新实验平台。
