














搜索
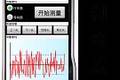
作品简介: 平整度的检测是铁路焊轨厂在生产高速路轨作业中必需的一道工位,以满足高铁运行的安全性和舒适性。通过对焊轨厂生产过程的调研,分析目前各种检测方法和手段,以微处理器作为控制核心,结合步进控制技术、计算机控制技术、无线通讯技术、传感检测技术,完成钢轨轨道焊头平直度的检测、数据显示及保存,以人机交互形式实现长物体表面平直度轨迹等特征参数监控。

作品简介: 蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。

作品简介: 本作品旨在针对手部中风患者和肌肉衰退老年人,研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,动作量化、精准,自动运行、可观测,并建立数据库,在患者的个体差异性问题上,进行有针对性的治疗,也为医生提供全面、定量化的分析依据,促进康复医学的发展。

作品简介: 本作品实现对2.4GHz、780MHz以及433MHz频段数据同时进行检测。通过Ethernet传到被测物联网的监控服务中心,并结合自主开发的协议分析软件对所采集的数据报文进行完整的协议解析。

作品简介: 本课题组研究并设计了一种基于直-9系列直升机的应急逃生系统。当直升机遇到紧急情况,须弃机逃生时,飞行员启动本装置,通过抛舱门-固定人、弹座椅、弹射伞、速开伞等过程实现安全着陆。系统的主要组成为:舱门定向抛离模块、座椅弹射模块、射伞模块、快速开伞模块、人-椅固定与分离模块等。该项目首次提出了将侧面双向弹射与迅速开伞有机结合的直升机逃生系统设计思路,填补了单旋翼和双旋翼均适用的直升机逃生系统研究空白。
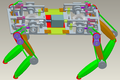
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。

作品简介: 本系统由微处理器、无线通信系统、键盘、显示器、温度传感器及人工控制台构成。工作时,下位机将数据打包并通过无线通信系统将数据包发送给上位机,上位机将数据拆分后分离提取出各项数据,进行分析判定并显示。上位机将数据和指令打包后通过无线通信系统发送给下位机装置,下位机中的微处理器对数据包进行拆分,并提取出相应指令和数据,再将指令和数据传递给PLC,由PLC还原给工业现场。微处理器通过串口与通信系统相连接。

作品简介: 涌突水是地下工程的主要地质灾害之一。实践表明,注浆方法是涌突水封堵治理的有效技术手段。但是动水注浆理论尚不成熟,尤其是裂隙动水条件下浆液扩散和封堵机理研究不足。针对上述问题,研发了准三维裂隙动水注浆模型试验台,经过试验分析,首次提出水泥浆液的U形扩散规律和分层分区扩散机制,得到浆液的快速析水沉积原理和沉积留核扩散规律。在此基础上,形成了以浆水比为核心控制因素的裂隙涌水注浆封堵新方法。

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。

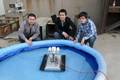
作品简介: 项目是由ICPF材料驱动的超微型仿生机器鱼,可由3V低电压驱动,具有体积小、无噪音、无水分解、成本低、生物亲和力很强等特点。作品对毫、厘米级水下微型仿生机器人的设计方法和控制方式进行研究,进行了运动和动力学建模。使用ICPF低电压“生物型”驱动器作为仿生机器鱼的动力装置,通过内置控制电路和微传感器实现了基于反馈控制的水下三自由度游动、避障、主从通讯及鱼群信息交互。在各领域具有广阔应用前景。

作品简介: 本作品设计了一种集海洋风能与波浪能开发于一体的浮海型混合发电系统。采用模块化设计思想,立轴风力发电装置与波浪发电装置设计成可独立运行的模块。立轴风力发电模块与波浪发电模块安装在浮体平台上,通过锚泊浮于工作海域。本作品走多能互补道路,实现了风能和波浪能的综合利用。

作品简介: 本项目设计一种钢丝绳芯胶带中钢丝绳阵列的无损检测装置。钢丝绳芯传输机,是在矿山企业中用来运输煤矿、矿石等物料的大型运输设备,胶带是其关键部件,胶带由外层的硫化橡胶和内部钢丝绳阵列组成。当内部钢丝绳出现断绳等缺陷时,胶带承载力下降,容易产生安全事故。本项目设计的装置采用漏磁检测方法,检测有缺陷的钢丝绳,用电路进行数据处理,计算机软件显示和控制。

作品简介: 立体车库的出现会解决现今汽车的存放的问题,在同一面积上存放更多的汽车,现在道路上的汽车的越来越多,汽车存放问题日益严重,所以立体车库的出现会大大缓解这一现象,而且我们的全自动立体车库更加信息化与网络化,如可以提前与车库系统连接,直接发送命令。车库会自动把车送出来,将会更加方便。

作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。

作品简介: 本作品是对多轴重型车辆转向控制领域一种全新的探索,应用Watt-II型六连杆多级耦合机构组成多轴转向系统,使重型车辆在满足阿克曼转向原理情况下实现全轮同时转向,增强了多轴重型车辆的机动性、小场地转向灵活性与操作稳定性。并将多级六连杆全轮转向系统与全轮驱动、独立悬挂技术良好结合,实现了多轴车辆集全轮驱动、全轮转向、独立避震于一身的发展趋势。
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。

作品简介: 为提高飞机挂载导弹的作业效率,本作品应用图像处理、自动控制、机械制造等技术设计并实现了一个基于机器视觉的辅助挂弹系统的仿真实体模型,可准确高效地完成机翼下多个导弹的挂载任务。系统采用视觉信息识别方法实现多组导弹挂架识别和定位;采用自动控制方法控制挂弹机械装置托举导弹到指定挂架位置;完成挂架任务后,通过无线通信模块自动更新挂弹状态,管理系统完成监控和查询所有挂弹装置的工作状态和挂弹信息的任务。

作品简介: 针对目前的控制实验系统存在局限性,本项目小组设计并开发了一种新型的控制实验系统,此系统弥补了现有控制实验系统中,控制软件开放程度不高、操作不够人性化、网络化实验平台的支持不足以及难于实现复杂控制算法实验等问题,具有广阔的应用前景和良好的社会效益。

作品简介: 本作品是一种小型独立安装的综合空气检测仪,采用太阳能市电互补、太阳能追踪、GPRS/GSM无线通讯,上位机软件等技术。可实现数据独立显示、数据无线传输和大规模联网检测以及远程控制等功能,能对大气的多个空气质量要素进行检测和实时新闻播报。在微控方面采用ARM单片机进行模块化处理,可以模块插接式增减。在传感器的使用方面利用了两个空气采集室,与当前传感器技术比较,使用寿命更长,准确性更好,适用范围更广。

作品简介: 这款无线电能传输装置,它应用了大功率高频传输线共振变压器(放大发射机)技术与耦合强磁共振原理,具有广阔的应用前景。军事上可以拯救低轨道军用侦察卫星,给星际空间的探索器供电,在空间建立超大尺寸反射镜,用于反射大功率微波。民用上可以给一些难以假设线路或危险的地区供应电能,解决地面太阳能电站、水电站、风力电站、原子能电站的电能输送问题。
