














搜索

作品简介: 该实验对原有的灌水器加以改进和加工,从而制造出新型的低压地下滴灌灌水器,并通过均匀性试验、压力—流量试验、土壤性能测试实验、土壤水分入渗实验对制成的新型灌水器进行性能调试与测定。试验结果表明:新型灌水器工作压力低、运行耗能少、抗堵塞性能强。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
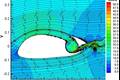
作品简介: 后置横流风扇升推力综合翼是一种将横流风扇融合进厚翼型后缘附近的上表面,利用风扇的吸附作用抑制气流分离并同时产生推力的新概念机翼。这种机翼创新性地将升力和推力紧密地联系起来,并且通过横流风扇进行机翼上表面的流动控制,达到增升的效果。在横流风扇的作用下,该机翼在较大迎角下不仅不会失速,反而能产生较高的升力和推力。另外,厚翼型的采用使得机翼的内部空间相对充裕,这在实际应用中具有很大的意义。

作品简介: 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。

作品简介: 随着社会的发展和文明的进步,人们越来越关注生活水平的提高。一方面,人们希望从日复一日简单繁重的家庭劳动中解放出来,有更多的时间和精力去从事更有意义的活动,以更轻松的余暇和心情享受更为丰富多彩的业余生活;烹饪机器人就是人们尝试解决这一问题的装置。我们的烹饪机器人是基于LabVIEW虚拟仪器编程,用NI的PXI6251进行信号传输控制的。其所有的控制电路及程序的开发均由我们自主设计研发。

作品简介: 该传感器系统设计实现了对粉体和颗粒等速度的快速、准确测量。测量结果受干扰程度小且测量系统成本低。在化工、能源、粉体传送等过程工业的检测与产品质量控制方面具有广阔的应用前景。同时,该传感器系统可为气固两相流的科学实验研究提供重要的测试手段。

作品简介: 在我国现有道路资源有限的情况下,规划BRT时往往重点考虑BRT优先运行条件而忽视了BRT对其他社会车辆的影响,造成社会车辆通行效率低和延误过大。本研究从交通组织的角度运用交通管理技术,合理进行交通组织,目的是协调BRT与社会车辆在道路通行资源上的分配冲突。通过设立交通管理原则、提出交通管理策略、制定交通运行方案,建立一套较为完善的面向BRT的交通管理模式。

作品简介: 本文根据广州亚运会安保实践,对典型的公安临时交通检查站驾驶员、民警行为进行了相关调查,分析了目前检查站存在的各类问题,通过调查数据计算和数学模型定量分析对公安临时交通检查站的人员配置、交通设施、追缉布控系统进行了设计和规划,并对不同公路等级的公安临时交通检查站做出标准化方案设计,其目的是为最大程度地遏制驾驶员冲卡行为发生,有效预防无意识冲卡现象出现。

作品简介: 该机器人针对核泄露事故代替救援人员进入现场实施救援工作。 该机器人采用履带式结构,具备三关节六自由度机械手臂。配备有核探测仪,可以得到核污染区辐射分布情况,也可以利用其机械手臂处理核污染废物。

作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 当今世界航空技术迅速发展,但普通固定翼飞机的起降方式存在很大的局限性,并不能很好的应对各式各样的突发状况。本作品就是以改良固定翼飞机起降性能为出发点,将垫升原理应用在其起降方式上,具体来说,就是将传统的轮式起落架转换为气垫式起落架,从而使固定翼飞机具有起降地形适应能力强、地面可操作性强等优点。

作品简介: 滑坡是全世界常见的自然地质灾害。针对实际需求,在滑坡体自动监测、无线局域网络传输、险情预报等方面展开了深入研究。在继承前人研究成果的基础上设计制作了“山体滑坡自动监测预警系统”。为了能够掌握滑坡孕育过程,全方位捕捉滑坡信息,同时传感器应具有精度高、反应快速高效、可广泛应用等特点,从监测滑坡原始信息着手,把“设计制作具有自主知识产权的倾角、地声、土壤含水量传感器”作为研究本课题的重点。

作品简介: 云台可三轴精确定向的无人直升机系统项目秉承设计、制造、飞行简单可靠,最终成果实用性强、性能优异的理念;所研制的直升机平台在云台可三轴精确定向、系统减震、复合材料轻强化设计等方面,都具有较好的创新性。该飞机是由上下行无线舆链路、微波、控制器、地面监视装置等组成,实际上是一种可便携的空中机器人系统,飞行结果表明,研究成果在航拍、航摄以及空中监测与跟踪方面有较广泛的应用前景。

作品简介: 深海复合轮式行走机构是一款全新的、兼有主被动混合越障模式的深海行走机构。该行走机构主要包括复合轮组机构、铰接式密封抗压型整体罐式车架、行驶机构、动力系统、传动系统、液压系统、控制系统,其相关技术涉及机械、计算机、信息、控制、新材料、通讯等多个学科及领域。复合轮式行走机构的巧妙的设计弥补了传统普通轮式行走机构越障能力弱的弊端,使得该行走机构具有良好的深海复杂地形自适应能力和很强的主动越障能力。

作品简介: 鉴于目前国内外扩眼器存在的服务费用高、扩眼效率低和工作安全性差等方面的不足,本文研制了一种安全性和可靠性较高的新型液压式随钻扩眼器。该扩眼器具有性能稳定,作业范围广和经济效益高等特点。其独特的设计弥补了传统扩眼器工具存在的缺陷,打破了国外的技术垄断。经过地面测试和海上试验井的应用检测,该扩眼器各项指标均达到了设计要求,扩眼效果良好,能满足我国陆地和海上油气田扩眼作业要求,具有较强的市场竞争力。

作品简介: 便携式微型储能点焊机,是专门为焊接薄型/超薄型钢板或精致小型零部件而设计的一种新型设备。可广泛应用于铁路、桥梁、电力、输油管道等领域的传感器现场快速固定。 该焊机利用超级电容存储能量,在电子电路控制下放电,使焊点介质瞬时发热而熔接。点焊机由电源电路、控制电路、储能电容、焊枪和接地夹具等组成。

作品简介: 本作品通过深入调研分析现有高速铁路运营业务信息系统基础上,提出研制开发基于可视化、集成化与智能化的高速列车群运营安全综合监控与预警实验平台。以期实现高速铁路列车群运营全过程的信息模拟仿真获取、融合、预警以及决策支持分析,实现基于历史运营信息的高速铁路列车群运营安全演变机理分析与综合评价模型验证,为高速列车群运营安全提供有力的保障。

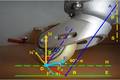
作品简介: 大角度矢量推力技术,通过发动机整体偏转,改变主动力作用点和施力方向,为飞行器更大程度地引入直接力控制模式,将飞行姿态运动和轨迹运动解耦,对飞行器进行快速操纵,从而极大地提高了飞行器空间运动的机动性和敏捷性。 本项目提出大角度矢量推力技术概念,结合理论分析,研究未来高机动性飞行器推力技术,论证大角度矢量推力技术对飞行性能的提升,并分析给出其系统工作过程。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。
