














搜索

作品简介: 本作品对无背索斜拉桥桥体结构的受力特点、施工过程、美学表现以及经济效应进行了研究分析,凸显出此种桥型的安全性,经济型,适用性及美观性;并以酒泉神舟友谊大桥为背景制作缩比模型。

作品简介: 本调研报告主要针对绿色混凝土在推广应用的过程中所遇到的阻碍进行调研。在广泛阅读文献资料的基础上,作者认为绿色混凝土的推广应用在原材料质量、使用环境、施工过程、检测方法以及垃圾处理等方面受到不同程度的制约, 严重影响混凝土的可持续发展道路。在分析与研究的基础上提出了相应的解决措施,对进一步推广绿色混凝土在实际工程中的运用具有重要的意义。

作品简介: 以邯济铁路跨京广铁路特大桥为对象,开展支座横窜成因的理论分析及解决方案研究。通过数值模拟与现场试验数据分析以及部分试验验证,找出诱发铰轴横向窜出的主要因素以及对列车运营的影响。在此基础上,开发设计一套简单易行的铰轴复位工装,达到彻底根治铁路桥梁支座铰轴横向窜移病害的目的,形成铁路摇轴(辊轴)支座铰轴窜出病害处理工法和成果。

作品简介: 由环保材料制成的魔术扶手,将伸缩、绿色充电、调温等功能融为一体,其安全性、实用性和环保理念让扶手的效用最大化,使之成为绿色交通中更加绿色的人性化产品。

作品简介: 目前,煤矿工程中越来越多的使用混凝土技术,例如立井施工、钢管支架充填混凝土、巷道砌碹等,但目前市场上很少有专门用于煤矿的小型防爆混凝土搅拌机,使得井下混凝土搅拌难题越来越突出,本发明力争填补此空白。矿用升降式气动混凝土搅拌机具有完全防爆、搅拌桶自由升降、体积小巧、方便携带等优点,可广泛适用于煤矿混凝土施工工程。

作品简介: 光谱技术在很多领域已被广为利用,但其在古代服饰文物鉴定与保护方面的应用却初见端倪。本文根据我国古代服饰文物的现状,结合北京服装学院民族服饰博物馆的三件珍贵藏品,介绍了用X荧光能谱仪等无损检测技术在服饰文物鉴定中的运用,并对仪器的无损检测在文物鉴定中的应用前景作了展望。

作品简介: 为了实现基于蓝牙通信的物联网,我们完成了蓝牙物联最小系统(BMIS)的制作,并成功使用它控制家用电器等物联网终端。而且还开发了相应的软件,更加提高了蓝牙物联最小系统的可用性。

作品简介: 北京建筑工程学院新校区体育馆方案设计,满足校级别运动会功能的需要,同时可以用于文艺演出、庆典、集会等活动。 在建筑语言的运用上,采用了圆的形式,同时,建筑外观充分与结构结合,在看似柔和的形体上外围加入了刚性的桁架,使人们能强烈的感受到她的存在。

作品简介: 一款用于高楼发生火灾等意外情况时逃生用的装置,也可以用于高空作业。
作品简介: 本项目拟以四氢呋喃(THF)水合物的形成为原理,建立一种常压下天然气水合物抑制剂性能评价装置,其原理及操作简便,能够代替高压条件下大型的仪器设备方法,用于适应广泛的天然气抑制剂的评价研究。

作品简介: 双雪花机器人是通过改变自身形状,由重力作为向前翻转的动力源带动机构前进。电机起的作用是改变机构外形,该机构是多边形结构,通过电机的往复正反转可以改变机构重心位置,然后由重力做功向前翻转。这种设计概念非常适用于复杂地形的运动,此时克服自身重力比克服地形阻力要相对轻松一些。 在控制上,应用可以带动两个直流电机的L298N芯片来实现电机正反转的控制功能。

作品简介: 扫撮一体机为将传统扫地过程的扫、撮、搬动一体化,从根本上改变扫地方式的新颖的扫地工具。它可连续单向工作,大幅度提高扫地效率的同时也明显降低了扫地中的劳动强度。另外,将通常的敞开式或半敞开式的撮子改成封闭状,基本消除了扫地过程中的扬尘现象。

作品简介: 该实验对原有的灌水器加以改进和加工,从而制造出新型的低压地下滴灌灌水器,并通过均匀性试验、压力—流量试验、土壤性能测试实验、土壤水分入渗实验对制成的新型灌水器进行性能调试与测定。试验结果表明:新型灌水器工作压力低、运行耗能少、抗堵塞性能强。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
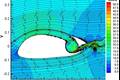
作品简介: 后置横流风扇升推力综合翼是一种将横流风扇融合进厚翼型后缘附近的上表面,利用风扇的吸附作用抑制气流分离并同时产生推力的新概念机翼。这种机翼创新性地将升力和推力紧密地联系起来,并且通过横流风扇进行机翼上表面的流动控制,达到增升的效果。在横流风扇的作用下,该机翼在较大迎角下不仅不会失速,反而能产生较高的升力和推力。另外,厚翼型的采用使得机翼的内部空间相对充裕,这在实际应用中具有很大的意义。

作品简介: 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。

作品简介: 该移动式自主救援避障机器人的研究项目属于国家级大学生创新实验项目的内容。主要立足于当前中国煤矿,地震等灾害事故频繁发生,现场的情况又十分复杂,为了避免对人产生二次伤害,我们需要一种可以帮助人们前往救援现场的机器人。不难看出,机器人代替了人的作用,所以我们项目主要解决的问题就是如何如何实现机器人的自主避障,控制机器人进行运动,如何携带传感器装置检测现场信息,如何携带救援物品进行救援等。

作品简介: 作品应用于电源测试。提出了以AVR单片微机处理器为核心的硬件技术路线,设计驱动变换主电路,外扩直流电压、电流信号的采集、光电隔离等检测电路。设计了PID控制算法与SPWM波相结合的软件系统,实现了电压同频同相的闭环跟踪;实现了纯阻性负载下的恒电流、恒电阻及恒功率的自动闭环调节功能,响应速度较快。采用了有源逆变、并网控制、并网电流正弦化等关键技术,实现了电能回收再循环利用,节省能源。

作品简介: 双向爬管(杆)机器人,通过控制驱动电机的正反转,可以在管或杆上实现双向自由爬动,操作简单、维护方便。

作品简介: 以低碳环保为目的,研究利用报废冰箱压缩机为核心部件,其他废旧物品为辅助零件研发、制作便携式空气压缩机,并最终制作出成品。使其能为家庭小型充气设备充气,携带方便,经济适用。并向市场推广、申报专利。
