














搜索

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
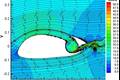
作品简介: 后置横流风扇升推力综合翼是一种将横流风扇融合进厚翼型后缘附近的上表面,利用风扇的吸附作用抑制气流分离并同时产生推力的新概念机翼。这种机翼创新性地将升力和推力紧密地联系起来,并且通过横流风扇进行机翼上表面的流动控制,达到增升的效果。在横流风扇的作用下,该机翼在较大迎角下不仅不会失速,反而能产生较高的升力和推力。另外,厚翼型的采用使得机翼的内部空间相对充裕,这在实际应用中具有很大的意义。

作品简介: 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。

作品简介: 随着社会的发展和文明的进步,人们越来越关注生活水平的提高。一方面,人们希望从日复一日简单繁重的家庭劳动中解放出来,有更多的时间和精力去从事更有意义的活动,以更轻松的余暇和心情享受更为丰富多彩的业余生活;烹饪机器人就是人们尝试解决这一问题的装置。我们的烹饪机器人是基于LabVIEW虚拟仪器编程,用NI的PXI6251进行信号传输控制的。其所有的控制电路及程序的开发均由我们自主设计研发。

作品简介: 该传感器系统设计实现了对粉体和颗粒等速度的快速、准确测量。测量结果受干扰程度小且测量系统成本低。在化工、能源、粉体传送等过程工业的检测与产品质量控制方面具有广阔的应用前景。同时,该传感器系统可为气固两相流的科学实验研究提供重要的测试手段。

作品简介: 在我国现有道路资源有限的情况下,规划BRT时往往重点考虑BRT优先运行条件而忽视了BRT对其他社会车辆的影响,造成社会车辆通行效率低和延误过大。本研究从交通组织的角度运用交通管理技术,合理进行交通组织,目的是协调BRT与社会车辆在道路通行资源上的分配冲突。通过设立交通管理原则、提出交通管理策略、制定交通运行方案,建立一套较为完善的面向BRT的交通管理模式。

作品简介: 本文根据广州亚运会安保实践,对典型的公安临时交通检查站驾驶员、民警行为进行了相关调查,分析了目前检查站存在的各类问题,通过调查数据计算和数学模型定量分析对公安临时交通检查站的人员配置、交通设施、追缉布控系统进行了设计和规划,并对不同公路等级的公安临时交通检查站做出标准化方案设计,其目的是为最大程度地遏制驾驶员冲卡行为发生,有效预防无意识冲卡现象出现。

作品简介: 该机器人针对核泄露事故代替救援人员进入现场实施救援工作。 该机器人采用履带式结构,具备三关节六自由度机械手臂。配备有核探测仪,可以得到核污染区辐射分布情况,也可以利用其机械手臂处理核污染废物。

作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 当今世界航空技术迅速发展,但普通固定翼飞机的起降方式存在很大的局限性,并不能很好的应对各式各样的突发状况。本作品就是以改良固定翼飞机起降性能为出发点,将垫升原理应用在其起降方式上,具体来说,就是将传统的轮式起落架转换为气垫式起落架,从而使固定翼飞机具有起降地形适应能力强、地面可操作性强等优点。

作品简介: 滑坡是全世界常见的自然地质灾害。针对实际需求,在滑坡体自动监测、无线局域网络传输、险情预报等方面展开了深入研究。在继承前人研究成果的基础上设计制作了“山体滑坡自动监测预警系统”。为了能够掌握滑坡孕育过程,全方位捕捉滑坡信息,同时传感器应具有精度高、反应快速高效、可广泛应用等特点,从监测滑坡原始信息着手,把“设计制作具有自主知识产权的倾角、地声、土壤含水量传感器”作为研究本课题的重点。
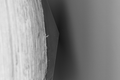
作品简介: 本作品涉及一种集宏微驱动、高精密检测、微纳米级力学性能测试和原位观测为一体的高性能微纳米力学测试系统,解决了现有测试装置体积大,无法实现原位测试的问题,利用研制的样机开展了压痕试验,并在SEM内成功实现原位压痕试验。本作品填补了我国在该领域的空白,将在军工、制造业、飞机汽车行业、精密光学、纳米技术、半导体与微机电行业、仿生材料和医用材料、生物医学、材料工程业、钢铁冶金等领域发挥重要作用。

作品简介: 本作品设计了一种新概念扇翼飞行器——扇翼机,其飞行原理与现有固定翼、旋翼飞行器的原理不同,它是在机翼上表面安装横流风扇,利用风扇旋转时产生的升力和推力供给飞行器进行飞行。该飞行器具有超短距起降、大迎角不失速、操纵控制简单、低速飞行稳定性和安全性好等优点。它比直升机结构和操控系统简单,巡航效率高;比固定翼机起降距离短,低速飞行时有效载荷大,是一种性能介于直升机和固定翼机之间的新型飞行器。

作品简介: 本作品是一种用于500kv六分裂高压架空线路巡检和维修的机器人,具有常规的线路巡检功能,并且可以用自身维修机械手对出现的线路故障进行修复,可实现自主上、下线,线上自主行走、越障等,动作迅速、高效,并可以在自身出现故障时完成自救。同时可以作为高压线日常维护工作的机器人移动平台,拓展出多种带电作业功能。

作品简介: 多功能车是为满足人们对多样化、智能化的需求,故生产的一种适应能力极强、智能化的新型越野车。其技术实现了车的智能化控制,车在行驶时能够根据路况自行进行优化控制。同时多功能车拥有大幅度的减震机构,后桥传动轴能够大角度摆动,既符合高速重心低,又符合越野底盘高的要求。更重要的是其底盘可调范围广,是其他同类产品所无法比拟的。此外,其自动化控制是大学生科技制作的又一亮点。

作品简介: 新型齿轮-叶片组合式液压泵是一种兼具齿轮泵和叶片泵优点的液压元件,它利用齿轮传动作为泵的动力来源,利用叶片实现吸排液,从而将齿轮传动的稳定性和叶片泵的大排量结合在一起,使排量比同尺寸齿轮泵增加30%,机械效率提高40%,达到了现代工业对液压元件的高可靠性和大排量的要求。此外该泵还可反转作为液压马达使用,具有多用途功能。

作品简介: 云台可三轴精确定向的无人直升机系统项目秉承设计、制造、飞行简单可靠,最终成果实用性强、性能优异的理念;所研制的直升机平台在云台可三轴精确定向、系统减震、复合材料轻强化设计等方面,都具有较好的创新性。该飞机是由上下行无线舆链路、微波、控制器、地面监视装置等组成,实际上是一种可便携的空中机器人系统,飞行结果表明,研究成果在航拍、航摄以及空中监测与跟踪方面有较广泛的应用前景。

作品简介: 本作品构造了一种集小水线面三体船、水翼艇和冲翼艇三者优良性能于一体的新型高性能复合船型——水面监测复合三体无人冲翼艇,突破了目前国内外只选用刚性充气艇和单体滑行艇作为无人艇平台的局限性。同时开发了其水面监测(包括目标监测和风浪流等环境监测)功能和避碰功能,在弥补海洋浮标的缺陷之余,能够大大降低人员成本,可应用于目标监测、水文信息监测、水面巡逻、水面缉私等领域,拥有显著的应用价值和产生好的经济效益。
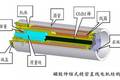
作品简介: 作品“磁致伸缩式惯性冲击精密直线电机”采用稀土超磁致伸缩材料(GMM)为驱动源,基于惯性冲击运动原理,提出了一种新型精密直线电机。 电机以锯齿波形电流为驱动信号,可实现双向直线运动,并能实现精确定位。经测试,样机的位移分辨率优于0.05μm,最大速度大于200μm/s,能够以低电压驱动,驱动能力强(大于10N),可实现无缆驱动,运动稳定性好。
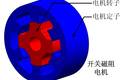
作品简介: 本作品将开关磁阻电机和磁轴承有机结合,首次采用双端对称三自由度磁轴承结构,对系统进行综合设计,使电机转子稳定悬浮在定子中央,实现7.5Kw开关磁阻电机35000rpm稳定悬浮运行,线速度达到141m/s。开关磁阻电机摆脱普通机械轴承的束缚,可以达到更高的转速和功率等级,拓宽了开关磁阻电机的应用范围,在多电/全电飞机、起动/发电系统等高速大功率领域具有非常广阔的应用前景。
