














搜索

作品简介: 这是一款提供给残疾人使用的智能肌电假手,采用集成化设计,体积小,质量轻。使用者只需把肌电信号采集电极贴在手臂对应位置,使用手腕上抬和下压等动作就可控制假手的张开和闭合,开合的速度和动作与手腕的用力程度成正比,握力也可由手腕用力大小控制,并且通过振动反馈告知使用者假手实时握力的大小。残疾人只需活动手腕就能自如地控制假手完成拿纸杯、鸡蛋等一般机械手难以完成的动作,给日常生活带来极大方便。

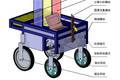
作品简介: 针对市场上清洁机器人只能扫地而不能有效拖地和价格昂贵情况,研制一种智能型扫地拖地清洁机器人。创新点有:(1)设计一种自清洁拖地结构,实现自动拖地和自清洁;(2)设计一种清洁机器人拖板的超声波清洗装置;(3)设计一种自动充水、排污水装置;(4)设计一种基于电子罗盘的全区域覆盖路径规划算法,提高清洁效率。获专利授权1项,申请发明专利2项,省一等奖2项,获市高校学生知识产权创新赛“金奖”,并获企业资助。

作品简介: 本作品针对智能电网双向的电力潮流和数字信息流,研发了一种实时测量双向通信智能电表。 1、储存刷新模块为智能电网高效节能管理,实时提供带时标的电量信息;2、双向交互式通信模块,可接收调控信息及浮动电价,发送电量及异常故障信息;3、双向电量计量软件,通过软件判断功率因数,成功地集成用户侧的分布式新能源;4、通过发送检测到的故障信息,电力公司可快速定位诊断电网故障点。

作品简介: 本作品发明了非有效接地配电网智能消弧与接地保护方法,在配电网瞬时性接地故障时,实现瞬时故障100%消弧,从而彻底消除由瞬时性故障引起的停电事故;在永久接地故障时,改变注入电流,检测并断开故障线路,实现接地保护,将接地保护可靠性由原来的20%提高到70%。作品已在全国应用,彻底解决了国内外长期存在的配电网接地故障消弧与保护难题,居国际领先水平。
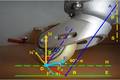
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。

作品简介: 该作品采用新型“W”无尾飞翼布局,控制舵面由十组互为独立的分布式控制舵面构成,其中四组舵面组成新型分裂式阻力方向舵。作品主要由无人机机体、动力系统、起落装置以及智能飞行导航控制系统组成。具有良好的开放性,为用户提供较好的飞行实验与验证平台,在实验教学、国防建设与民用航空领域均具有较强的应用与发展前景。

作品简介: 本设计中的智能抢险探测机器人以ATMEL公司的ATMEGA16L单片机为控制核心,实现智能控制和智能救援,包括跨越“受损桥梁”、测量并计算桥梁高度、道路选择、智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、时间、高度显示等功能。
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。
作品简介: 平整度的检测是铁路焊轨厂在生产高速路轨作业中必需的一道工位,以满足高铁运行的安全性和舒适性。通过对焊轨厂生产过程的调研,分析目前各种检测方法和手段,以微处理器作为控制核心,结合步进控制技术、计算机控制技术、无线通讯技术、传感检测技术,完成钢轨轨道焊头平直度的检测、数据显示及保存,以人机交互形式实现长物体表面平直度轨迹等特征参数监控。

作品简介: 本作品旨在针对手部中风患者和肌肉衰退老年人,研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,动作量化、精准,自动运行、可观测,并建立数据库,在患者的个体差异性问题上,进行有针对性的治疗,也为医生提供全面、定量化的分析依据,促进康复医学的发展。

作品简介: 本作品是一种小型独立安装的综合空气检测仪,采用太阳能市电互补、太阳能追踪、GPRS/GSM无线通讯,上位机软件等技术。可实现数据独立显示、数据无线传输和大规模联网检测以及远程控制等功能,能对大气的多个空气质量要素进行检测和实时新闻播报。在微控方面采用ARM单片机进行模块化处理,可以模块插接式增减。在传感器的使用方面利用了两个空气采集室,与当前传感器技术比较,使用寿命更长,准确性更好,适用范围更广。
上一页 1 下一页
