














搜索
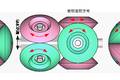
作品简介: 此项目为主要面向老龄化社会服务的全方位移动机器人。从设计整体上讲,组合式全方位轮解决了限制该类轮子应用的瓶颈问题,即轮子的强度及承载力的问题,有效地提高了全方位轮的承载能力,同时改善了越障能力。该全方位轮可以应用到轮椅上,帮助人们方便灵活地运动。也可以应用到自动化工厂,实现在拥挤环境下的重物搬运工作。具有广泛的市场空间和应用前景。
作品简介: 秉着“让家庭更智能,让城市更美好,让世界更绿色”的总目标,针对玻璃幕墙的清洗以及太阳能光伏玻璃(填补产业领域空白)等巨大清洗市场,本作品应运而生,设计结构紧凑、小巧灵活、控制灵敏、无线控制,可实现机器人群清洗。成本低廉,注塑生产,市场价可低至RMB5000元,易形成产业化,将对壁面清洗机器人的发展有深远意义。目前机器人处于实验室阶段。

作品简介: 该作品可在无人环境下进行大范围搜索活动,具有实用价值。 该作品技术水平较高。系统具备一定的分布式特征,因此具有较强的工作能力、较高的工作效率和稳健性。该系统结构完整,具备目标查找、障碍物躲避、个体间协调与通信等功能,且提供丰富的交互功能,方便用户使用。 该系统具有较好的应用前景,可用于执行无人环境下的大面积搜索、大型场地测量乃至大型搬运等任务。

作品简介: 解决井下事故发生后瓦斯浓度的监测和图像的采集与传输的问题,以便及时了解矿井情况,搜救被困人员。

作品简介: 使用了机械自动化与电脑编程的相关知识,能很好的解决实际保洁自动化问题,相较于市场其他拖地机器人,成本较低,实现在无人情况下的自动保洁,且有丰富的发展与升级空间。

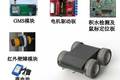
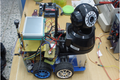
作品简介: 本机器人为一款全新设计的无线控制爬楼灭火机器人,将爬楼、灭火、侦查、经济性等关键因素有机的融合。整车采用模块化设计,主要由机械传动模块、无线控制模块、图像无线传输模块、灭火模块、电源模块等五个基本模块组成。整车的主要机械结构为四个十字轮架结构。作品的控制方式为无线控制,可以完成爬楼、直线行走、越障、转弯等一系列的动作。灭火方式为水雾和高压水柱(可调)。

作品简介: 排爆是一项复杂细致、危险度高的工作。相对国外来讲,我国在排爆机器人方面起步较晚。国内现使用的排爆机器人多为进口产品,价格昂贵,维护困难。目前,国内机器人在视觉遥控系统方面的研究起步较晚,大多停留在呈现单个图像的阶段。我们研发的是一款成本较低的、基于视觉遥控和随动系统的排爆机器人,可有效降低排爆的难度和效率。

作品简介: 本作品是为了适应现代航天科技事业,为了推动深空探测技术的发展,探测宇宙的奥秘,进一步解决中国在月球探测道路上的难题。
作品简介: 现代人的一生有80%的时间在室内度过,室内空气质量问题日趋严重,安全隐患令人担忧,故对室内环境的研究具有迫切意义。目前,我国环境监测设备满足不了实际工作中的需要。本项目针对室内环境传统检测方法效率低,实时性差,监测内容单一等问题,设计一款集环境质量评价和部分污染源定位为一体的室内环境监测机器人,实现十项参数的动态测量、实时分析,污染源的准确定位,人机交互。适用于新居环境检测行业和无人值守的室内。

作品简介: 本项目旨在设计制作完成医院病房巡视机器人一台,能够满足医院病房复杂环境下的日常巡护任务。护士通过远程PC机或机载PC机上的简单手动或语音操作,即可指示机器人进行某个病房或多个病房的巡视任务。记录病人生理指标和仪器的监护数据,以图像形式传输到远程PC机上。远程PC机上能够实时显示机器人的运动状态,并能对机器人进行实时控制。能够按照护士指令,捕获病人行为和表情,以便于护士对病人异常行为检测。
作品简介: 该智能机器人的设计实现了安全、实时、准确、高效、可视地探测某一区域的环境参数,并通过无线的方式将采集到的数据传送到控制端。

作品简介: 目前我国正面临用工荒的问题,如果引进餐饮服务机器人不仅可以减少运营成本,缓解人员紧缺的局面,还能实现老板的轻松管理。 本作品适用于大中型餐厅、酒店。她能代替服务员完成多媒体交互式迎送客人;人机交互式点菜,以多媒体形式介绍客人欲点菜特点;代替服务员自动移动到目标餐桌上菜;接收客人呼叫信号;辅助服务员作为餐后碗碟自动运载工具等大量的服务工作。
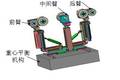
作品简介: 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。

作品简介: 随着科技的快速发展,机器人已经从科学家的实验室走进学校的课堂,机器人教育越来越受到人们的关注,也越来越受到教育界的关注。开展机器人教育,能够促进学生的全面发展。我国许多高校、职业技术学院、中小学都在逐步开展各种形式的机器人教育,有非常大的发展空间。 在此基础上,机器人的推广和普及是大有可为的,在这样的背景下就需要有适合的机器人教学平台。我们做的就是这一块的工作

作品简介: 本研究旨在利用通过对大鼠PAG脑区施加的电刺激引发的“虚拟恐惧”来实现大鼠长时间可控静止状态的实现。本研究结果可被应用入大鼠导航动物机器人中,以完成大鼠机器人在某些任务(如抢险救灾)中的定点观察及隐蔽等行为。

作品简介: 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。

作品简介: 本设计将单片机通信、无线数据传输、各种传感器、图像采集、微控制技术综合到一起,有很强的实用性,并且其中将先进的无线通信技术,图像采集技术发挥到很大的功效。本作品用于测量实际生活中不利于人活动地方的环境动态监测并通过无线通信对此地区做相应的控制,以达到人们预期的目的。

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 运用3D立体成像技术制作侦查系统,让观看者有身临其境的感觉,能更好的对场地进行有利判断。侦查机器人还配装有破障和取材功能,破障功能可以使侦查机器人在多种地形中不受限制的移动,同时在机器人上安装一只多自由的机械手和一只可切换功能的组合臂以实现取材功能,可完成多种复杂工作。

作品简介: 本设计的清洁机器人是以路虎小车为底盘,STC89S52单片机为控制核心,加以直流电机、红外线传感器、电源电路、遥控电路以及其它电路构成,主要分驱动模块、避障模块、无线通讯模块、清洁地面模块、工作机构升降装置和供水系统等。设计的清洁机器人有两种工作模式:一为遥控工作模式;二为自动工作模式。
