














搜索

作品简介: 本设计的清洁机器人是以路虎小车为底盘,STC89S52单片机为控制核心,加以直流电机、红外线传感器、电源电路、遥控电路以及其它电路构成,主要分驱动模块、避障模块、无线通讯模块、清洁地面模块、工作机构升降装置和供水系统等。设计的清洁机器人有两种工作模式:一为遥控工作模式;二为自动工作模式。

作品简介: 随着我国国民经济建设的快进发展,高速公路铁路,机场码头,电站等建设迅速增长,尤其是我国大西北开发,袋装水泥的用量极大,而袋装水泥的拆袋是一个特殊难题,现在基本是靠工人拆水泥袋,费工费力效率低,污染环境,对工人的身体健康不利,另外袋装水泥拆袋后输送到搅拌机的困难更大。 本实用新型的目的在于克服上述技术不足,提供一种拆袋速度快,减少环境污染,可与输送机配套的自动水泥拆袋机。

作品简介: 本作品是将纳米级TiO2制备成高效渗透剂,将其应用于道路交通环境中(如沥青路面、水泥路面等),以吸收道路交通环境中的NOX。本作品攻克的 技术难点是解决了水溶性的光催化剂与脂溶性的沥青路面的附着问题。同时,由于纳米TiO2是作为催化剂参与反应,经过雨水冲洗可以自身还原,可重复利用。

作品简介: 该作品是一款基于轮履复合技术的移动机器人,可根据不同地形条件在履带与轮两种行进方式间转换,兼顾了移动效率和越障性能;同时加装仿蝎尾结构,为机器人后部提供一个附加着力点,提高越障能力。该机器人具有良好的地形适应性,可应用于军事侦察、地形勘探、灾后救援等领域。

作品简介: 该作品为一个新型的、实用的、易用的、高效的、安全性高的ATM系统。系统采用视觉控制方代替ATM的手工输入,通过人脸识别来确定操作人的合法性。通信过程中对数据进行透明加密。人眼操作需要人眼特征参数,如果不是本人,无法准确定位人眼的注视坐标。每次进行“确定”操作时,根据实时人脸识别来进行验证是否是本人。如果不是本人,则操作无效。每一个操作界面的屏幕键盘数字的位置随机改变,提升安全性。

作品简介: 本装置是一种新型水流发电装置,它借助的是流体力学中常见的涡激振动原理,首先研究确定了适于进行发电的涡激振动参数状态,确定了模型机构,设计了将涡激振动导致的振动体往复运动转化为单向转动的传动装置,带动发电机获取电能。
作品简介: 本项目实现了基于数字证书的无线校园网安全接入统一认证系统,包括支持标准802.1x协议的客户端软件WAAASupplicant和以freeRadius+openLDAP为基础构建的认证服务器两部分。随着WEP、WPA近期被有效破解,无线局域网面临着严峻的接入安全威胁,本作品改变了传统的基于用户名和密码的认证方式,在开放、移动的无线校园网环境中为用户提供高安全性的接入认证服务。
作品简介: 本文结合印刷天线技术及WLAN频段内的印刷天线模型[15]设计并制作了一种带过孔的小型化印刷COCO天线,它同时具有宽频带、高增益和全向性。

作品简介: 本作品为一款柔性的五指灵巧手,能够实现人手的基本动作,完成简单的操作。 本灵巧手通过研究人手的医学解剖结构,最终尺寸与正常成年男子左手的尺寸十分接近,自由度可以达到32个。可以应用在极限或有害环境下帮助人类有效地从事科研、生产等活动;在服务方面,由于拟人型造型,本作品比其他机器手更容易被人们所接受;医学上,设计制造接近正常人手尺寸的灵巧手,有利于为手部残疾的患者更好的假肢提供技术参考。

作品简介: 腿型连续跳跃机器人属于一种关节式跳跃机器人,由两个主动关节和一个被动关节及具有柔顺的脚掌组成,机器人在电机及蓄能元件的耦合驱动下实现跳跃运动,柔顺脚掌和被动关节的引入提高了机器人的跳跃性能和落地稳定性。本作品主要从机器人结构设计及机构参数优化、运动轨迹规划、动力特性分析及落地稳定性等方面进行了研究。本作品在考古探测、军事侦察、地质勘探、抢险救灾等活动中有广阔的应用前景。

作品简介: 本模型为压水堆全系统的实物模型,包括一回路、二回路及冷却系统等环节,全面真实地模拟了核电站的主要设备,演示其运行状况。依据与核动力装置相似的工作原理,模型可在低温常压条件下使用,且造价低。本模型可用于核动力相关部门及教学单位对核动力装置的实物动态模拟演示、科普宣传和教学,有助于加深学生对压水堆的结构及工作原理的认识和理解,解决长期困扰师生的理解困难及课程难点。

作品简介: 高速公路具有车速高、通行能力大、运输费用少、行车安全等优点,自从其诞生的那一天开始就受到人们的青睐。作为高速公路的重要组成部分——隔离带一直以来都是由冬青树等园林草木充当,但这些草木都需要定时的修剪。在车流量大、车速高的高速公路上,这是非常危险的。可见设计一种不用修剪、修理的且具有回收车辆耗散风能的风力发电装置隔离带是十分常必要的。

作品简介: 本作品是一个多功能的AUV,即无缆化水下作业机器人。采用自主研制的水下推进器作为动力装置,实现多自由度灵活运动。具有水下探测,识别,定位,跟踪,作业等功能。 本机器人应用范围非常广泛,如海洋输油管道检查;跨江、跨河管道检查;船体检修;船底探查;码头及码头桩基、桥梁、大坝水下部分检查;航道排障、港口作业;水下考古、水下沉船考察等一系列应用。

作品简介: 本项目采用多平台组合设计,在较为陡峭,前进障碍多的环境中,可以采用履带式平台执行任务。在较为狭窄境中可以采用蛇形机器人平台。将类蛇形机器人装载在履带式式机器人平台之上。无论在稳定性,环境适应性,平台多功能性上都具有很大的优势。同时,在类蛇形机器人上安装具有可探测周围环境功能的激光雷达和能够记录轨迹的导航仪。这样,机器人在陌生地形就具备了实时建图的功能,这些都对救援工作有着重要的意义和实用价值。

作品简介: 本项目智能高速无人巡逻艇能够依据地面站设定的经纬度坐标,通过gps全球定位系统以及三自由度加速度传感器实现稳定自主航行,快速抵达目标等任务;通过船载摄像头采集图像并进行图像识别以实现自主避障功能。未来可应用于近海巡逻,打击海盗,侦查,港口安全,海上拦截和封锁,靶船实验等。
作品简介: 长寿命免维护海水电池(亦称金属-溶解氧半燃料电池),以Mg-Li基合金为阳极,海水中溶解的氧气为阴极氧化剂,海水为电解质。它具有结构简单、能量密度大、使用寿命长、安全和免维护等突出优点,可以广泛用作水下无人运载器、水下导航、通讯、数据采集、地震监测仪等电子仪器、油气开采设备和航标灯等的电源。
作品简介: 光力学效应实验仪以光具有动量这一基本物理原理为出发点、以光与物质相互作用时产生的力学效应为核心,为直观生动地演示光的粒子性提供了极好的手段。通过本实验,能够使学生切实观察、感受到光的力学效应以及这种效应的巨大应用前景,加深对光的粒子性这一基本物理事实的认识。
作品简介: 本系统基于GSM网络,采用TC35I手机模块来收发短信息,同时根据判别所接受信息内容,通过有线或无线模块对相应的家居发出相应的命令,让其实现相应的操作,或者根据家庭当前状况向主人手机发送相应的报告信息。

作品简介: 系统综合运用RFID技术、ZigBee无线传感网络技术、GPRS移动通信技术语音播报引导、远程网络监控、数据库技术等,进行了构建管理中心子系统、停车场自动管理子系统和系统网络通信设计三部分的研究工作。 通过此系统可以很好的解决目前我国车位利用率低,车位资源不足,车位具体位置空闲与否等信息的传递问题,进一步有效地解决我国所面临现实问题。
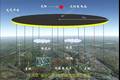
作品简介: 太阳能发电站以地面电站为主,但对于土地资源本已十分紧张的人类来说,不可能拿出大量的土地建设规模庞大的太阳能电站。 平流层是近空太阳能发电的理想之地。 本实用新型是一种上表面为近似平面的充气平台太阳能电站,电能可以通过导线直接传到地面换流站,再变为交流电进入供电网络,使人类利用平流层太阳能发电成为现实,为人类摆脱能源危机和环境污染提供了一个新的方案。
